





























4 Repair
4.5.2 Changing the intermediate gear including sealing
3HAC026320-001 Revision: A
97
4.5.2 Changing the intermediate gear including sealing
General
See foldout 8 in chapter, Foldout.
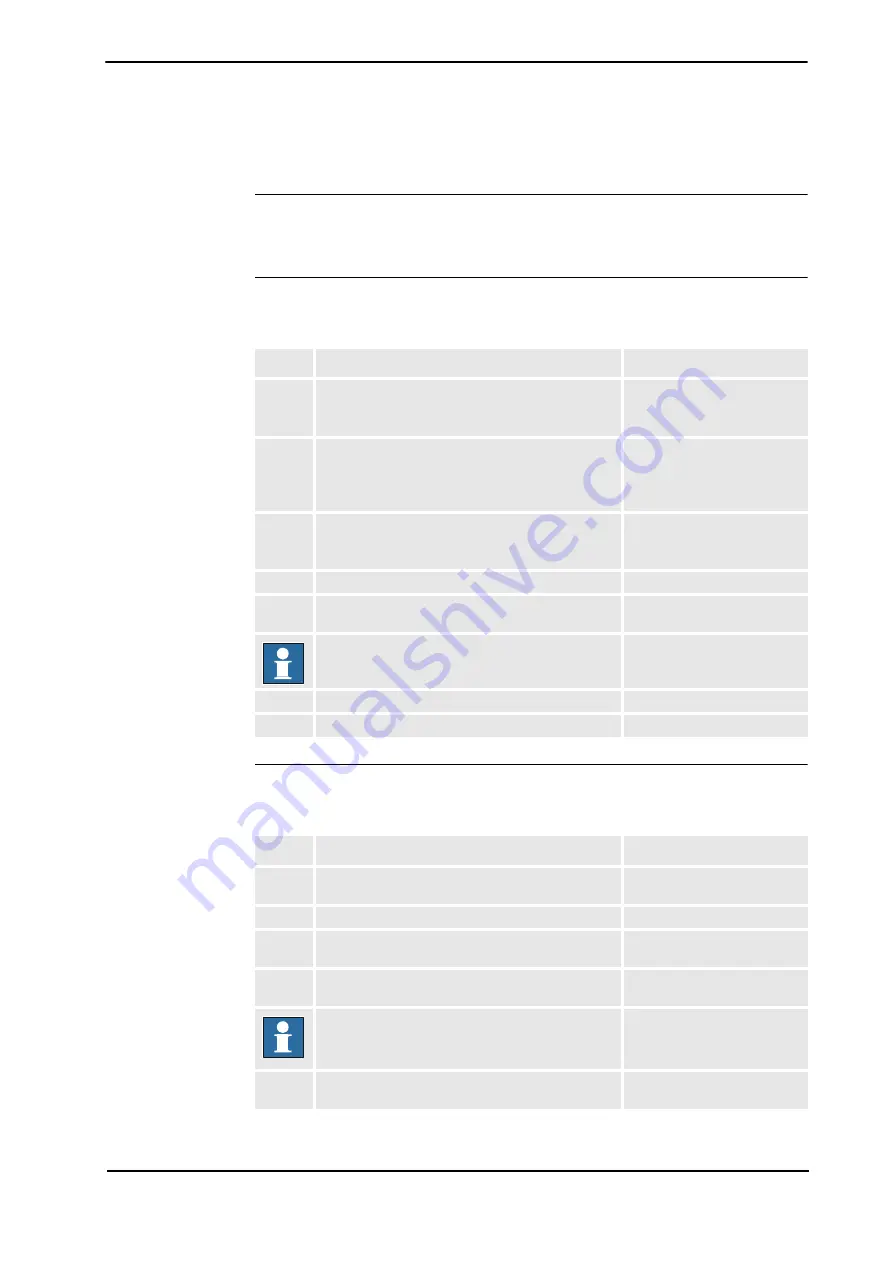
To dismantle
To assemble
Action
Note/Illustration
1.
Dismantle the wrist as described in.
Detailed in section:
Dismantling the wrist on page
106
2.
Dismantle the drive mechanism according to.
Detailed in section:
Dismantling the complete
drive mechanism of axes 5
and 6 on page 107
3.
Dismantle the motor of axis 4 as specified in.
Detailed in section:
.
4.
Remove the cover.
See foldout/pos. <8/25>
5.
Undo screws fixing the large drive gear and dis-
mantle it.
See foldout/pos. <8/18> and
<8/17>.
NOTE!
Put the shims in a safe place.
6.
Undo screws.
See foldout/pos. <8/12>.
7.
Push the intermediate gear out of the arm housing.
Action
Note/Illustration
1.
Grease the seating of the arm housing to provide
radial sealing.
2.
Push the gear unit down into the arm housing.
3.
Screw in screws together with their washers and
pull the gear down.
See foldout/pos. <8/12> and
<8/13>
4.
Mount the drive gear <17> using screws <18> and
tighten to a torque of 8.3 Nm ±10%.
NOTE!
Do not forget to insert shims under the drive
gear.
See foldout/pos. <8/14, 8/15,
8/16>
5.
Tighten the screws.
See foldout/pos. <8/12>
Torque, approximately 5 Nm.
Summary of Contents for IRB1410
Page 1: ...Product manual Articulated robot IRB1410 M2004 ...
Page 2: ......
Page 3: ...Product manual IRB 1410 M2004 ID 3HAC026320 001 Revision A ...
Page 8: ...Table of Contents 6 ...
Page 114: ...4 Repair 4 8 1 General 112 3HAC026320 001 Revision A ...
Page 124: ......
Page 136: ......
Page 138: ...7 Recommended Spare parts 7 0 1 Spare parts 136 Revision A 3HAC026320 001 ...
Page 140: ...8 Foldouts 8 0 1 Introduction 138 3HAC026320 001 Revision A ...
Page 141: ......
Page 142: ......
Page 143: ......
Page 144: ......
Page 145: ......
Page 146: ......
Page 147: ......
Page 148: ......
Page 149: ......
Page 150: ......
Page 164: ...Index 152 3HAC026320 001 ...
Page 165: ......





































































