





























2.7.4.2 Configuration examples
Standard cable chain
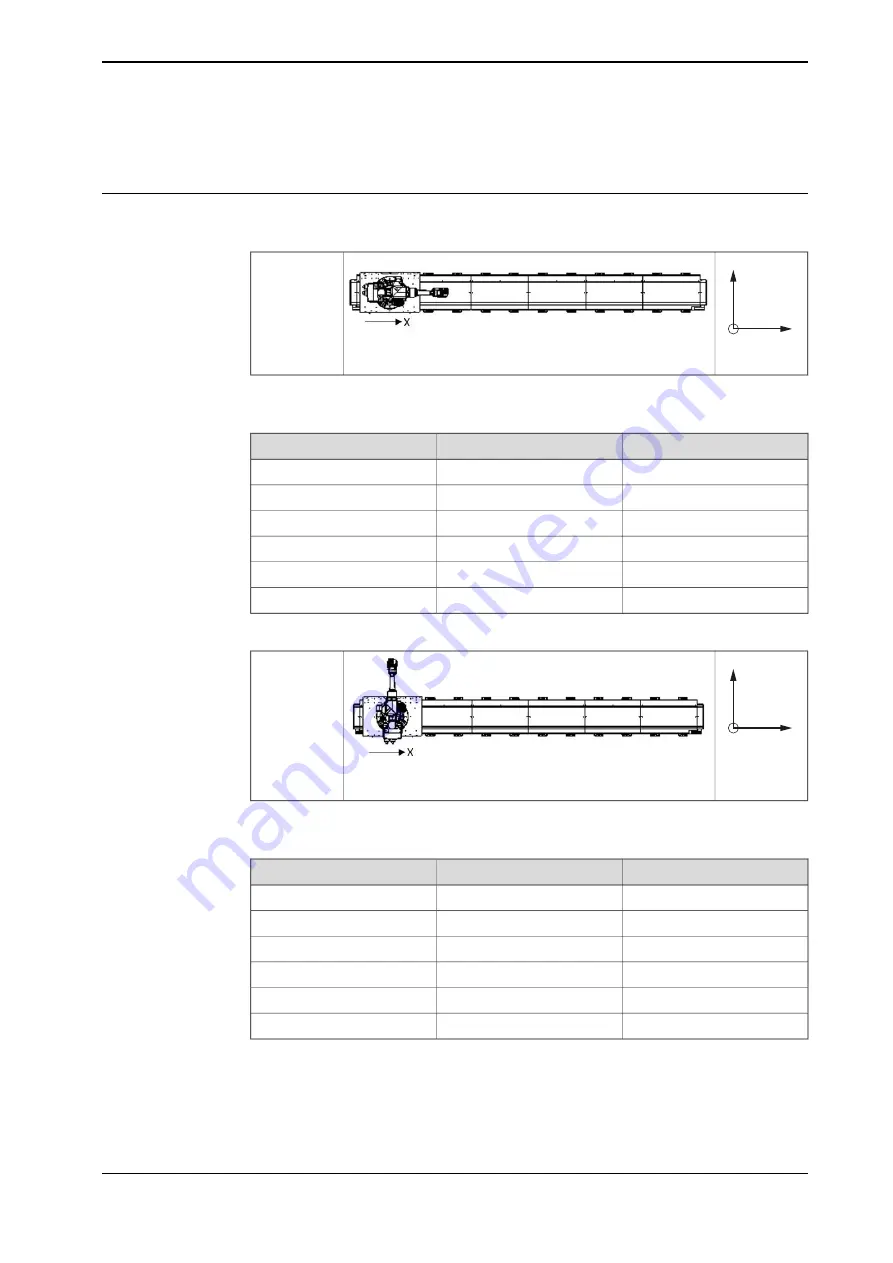
IRB 0° (in line) in relation to the World coordinate system
Y
Z
X
WORLD
xx1500000928
xx1400001911
0 degrees (in
line)
•
Positive travel direction x in World coordinates
•
Standard travel direction
Track motion (
TRACK_1
)
Robot (
ROB_1
)
Parameter
1
1
Base Frame q1
0
0
Base Frame q2
0
0
Base Frame q3
0
0
Base Frame q4
-
0
Gamma Rotation
track1
-
Use Joint
IRB rotated 90° in relation to the World coordinate system
Y
Z
X
WORLD
xx1500000928
xx1400001912
+90 degrees
•
Positive travel direction x in World coordinates
•
Standard travel direction
Track motion (
TRACK_1
)
Robot (
ROB_1
)
Parameter
1
0.707107
Base Frame q1
0
0
Base Frame q2
0
0
Base Frame q3
0
0.707107
Base Frame q4
-
1.570796
Gamma Rotation
track1
-
Use Joint
Continues on next page
Product manual - IRBT 2005
135
3HAC051130-001 Revision: F
© Copyright 2015 - 2018 ABB. All rights reserved.
2 Installation and commissioning
2.7.4.2 Configuration examples
Summary of Contents for IRBT 2005
Page 1: ...ROBOTICS Product manual IRBT 2005 ...
Page 8: ...This page is intentionally left blank ...
Page 44: ...This page is intentionally left blank ...
Page 148: ...This page is intentionally left blank ...
Page 284: ...This page is intentionally left blank ...
Page 286: ...This page is intentionally left blank ...
Page 289: ......


































































