


























Attaching lifting accessories
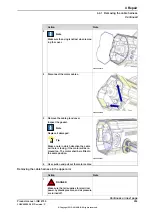
Use these procedures to remove the wrist.
Robot position
Note
Action
Jog the robot to the specified position:
•
Axis 1: no significance (as long as
the robot is secured to the founda-
tion)
•
Axis 2: comfortable working position
•
Axis 3: comfortable working position
•
Axis 4: +90°
•
Axis 5: 0°
•
Axis 6: no significance.
1
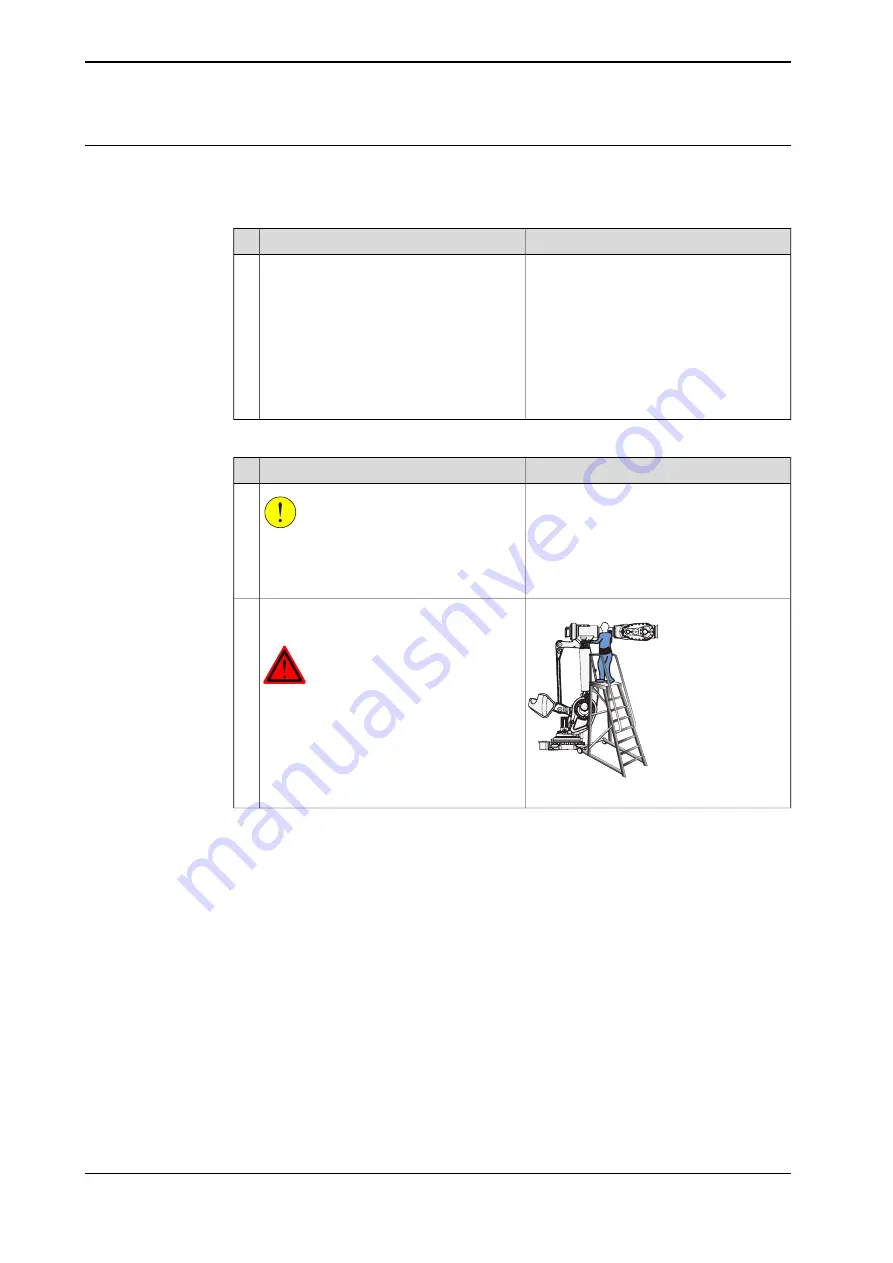
Attaching lifting accessories to the wrist
Note
Action
CAUTION
The complete wrist weighs 500 kg.
All lifting accessories used must be sized
accordingly!
1
Mobile platform ladder
xx1500001985
Use a Mobile platform ladder (or similar) to
attach the lifting accessories.
DANGER
Never use the robot as ladder!
2
Continues on next page
196
Product manual - IRB 8700
3HAC052853-001 Revision: F
© Copyright 2015-2018 ABB. All rights reserved.
4 Repair
4.3.2 Attaching lifting accessories to the wrist
Continued
Summary of Contents for IRC5 Compact
Page 1: ...ROBOTICS Product manual IRB 8700 ...
Page 16: ...This page is intentionally left blank ...
Page 824: ...This page is intentionally left blank ...
Page 838: ...This page is intentionally left blank ...
Page 840: ...This page is intentionally left blank ...
Page 846: ......
Page 847: ......







































































