




























Note
Action
If both balancing devices shall be removed,
remove the other in the same way.
10
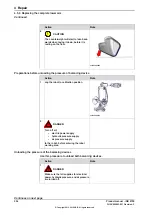
Robot position when removing screws in the first area
With the robot in this position it is possible to reach the screws in the first of the
three areas of screws, that secure the axis-2 gearbox to the lower arm and the
axis-3 gearbox to the parallel arm.
Note
Action
Jog the robot to the specified position:
•
Axis 1: no significance as long as
the robot is fitted to the foundation.
•
Axis 2: +30°
•
Axis 3: -20°
•
Axis 4: 0°
•
Axis 5: 0°
•
Axis 6: No significance.
1
DANGER
Turn off all:
•
electric power supply
•
hydraulic pressure supply
•
air pressure supply
to the robot, before entering the robot
working area.
2
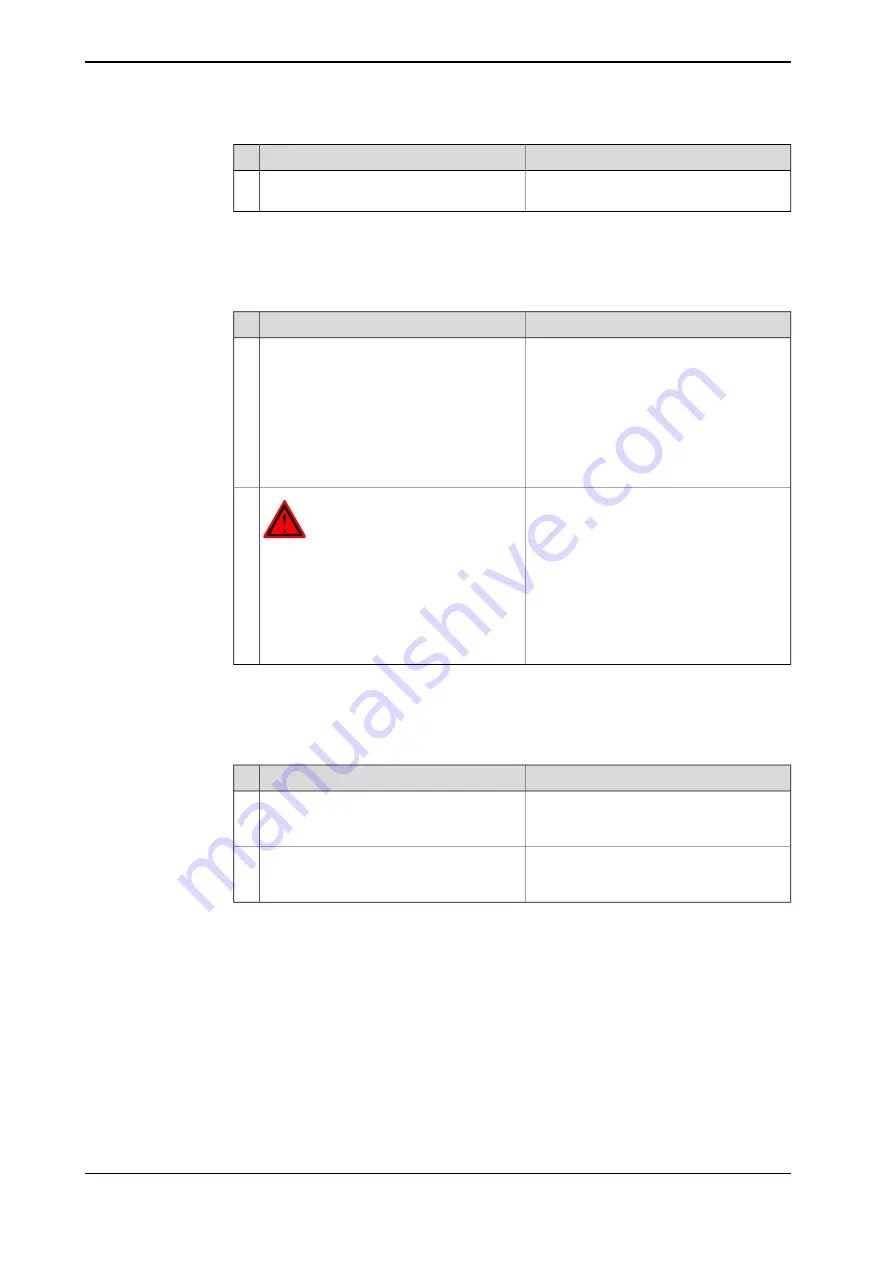
Removing the attachment screws in the first area
Remove attachment screws in the first of the three areas of screws. Remove screws
that secure the axis-2 gearbox to the lower arm, as well as the ones that secure
the axis-3 gearbox to the parallel arm.
Note
Action
Unscrew and remove screws, that secure
the
axis-2 gearbox
to the lower arm, now
possible to reach.
1
Unscrew and remove screws, that secure
the
axis-3 gearbox
to the parallel arm, now
possible to reach.
2
Continues on next page
358
Product manual - IRB 8700
3HAC052853-001 Revision: F
© Copyright 2015-2018 ABB. All rights reserved.
4 Repair
4.5.6 Replacing the complete lower arm
Continued
Summary of Contents for IRC5 Compact
Page 1: ...ROBOTICS Product manual IRB 8700 ...
Page 16: ...This page is intentionally left blank ...
Page 824: ...This page is intentionally left blank ...
Page 838: ...This page is intentionally left blank ...
Page 840: ...This page is intentionally left blank ...
Page 846: ......
Page 847: ......







































































