





























Refitting the lower arm assembly - step 1
The lower arm assembly consists of the lower arm and the parallel arm.
Note
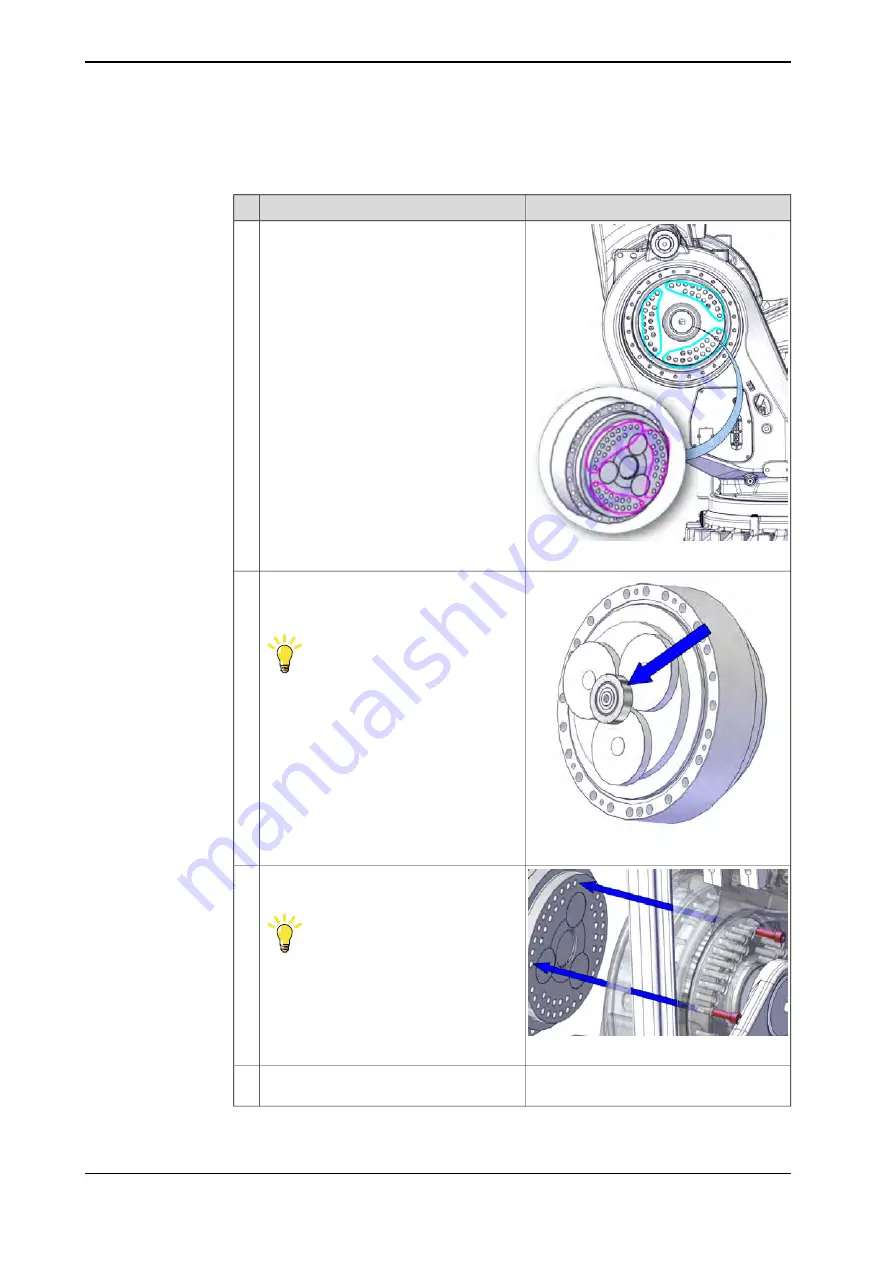
Action
xx1500002344
The hole pattern in gearboxes and robot is
arranged in three areas.
Find the hole pattern between lower arm
and axis-2 gearbox, as well as between
parallel arm and axis-3 gearbox. Make sure
that all reachable screw holes will match,
before securing any of the attachment
screws.
1
xx1500002345
Release the brakes on axis-2 and find the
hole pattern between lower arm and axis-
2 gearbox.
Tip
Use caution and rotate the small gear on
the axis-2 gearbox.
2
xx1500002740
Attach as many screws as possible with
the robot in this position.
Tip
Begin by fitting screws in the outer holes
in the outer ring of holes, to make sure the
hole pattern will match.
If needed, carefully turn the small gear in
the gearbox to find the hole pattern.
3
Tightening torque: 300 Nm
Secure the attached screws that secure the
lower arm to the axis-2 gearbox.
4
Continues on next page
476
Product manual - IRB 8700
3HAC052853-001 Revision: F
© Copyright 2015-2018 ABB. All rights reserved.
4 Repair
4.5.7 Replacing the parallel arm
Continued
Summary of Contents for IRC5 Compact
Page 1: ...ROBOTICS Product manual IRB 8700 ...
Page 16: ...This page is intentionally left blank ...
Page 824: ...This page is intentionally left blank ...
Page 838: ...This page is intentionally left blank ...
Page 840: ...This page is intentionally left blank ...
Page 846: ......
Page 847: ......







































































