





























Note
Action
If the robot is to be calibrated with fine
calibration:
Remove all external cable packages
(DressPack) and tools from the robot.
Removing the motor
Use these procedures to remove the axis-2 and axis-3 motors.
Preparations before removing the motor
Note
Action
Decide which calibration routine to use,
and take actions accordingly prior to begin-
ning the repair procedure.
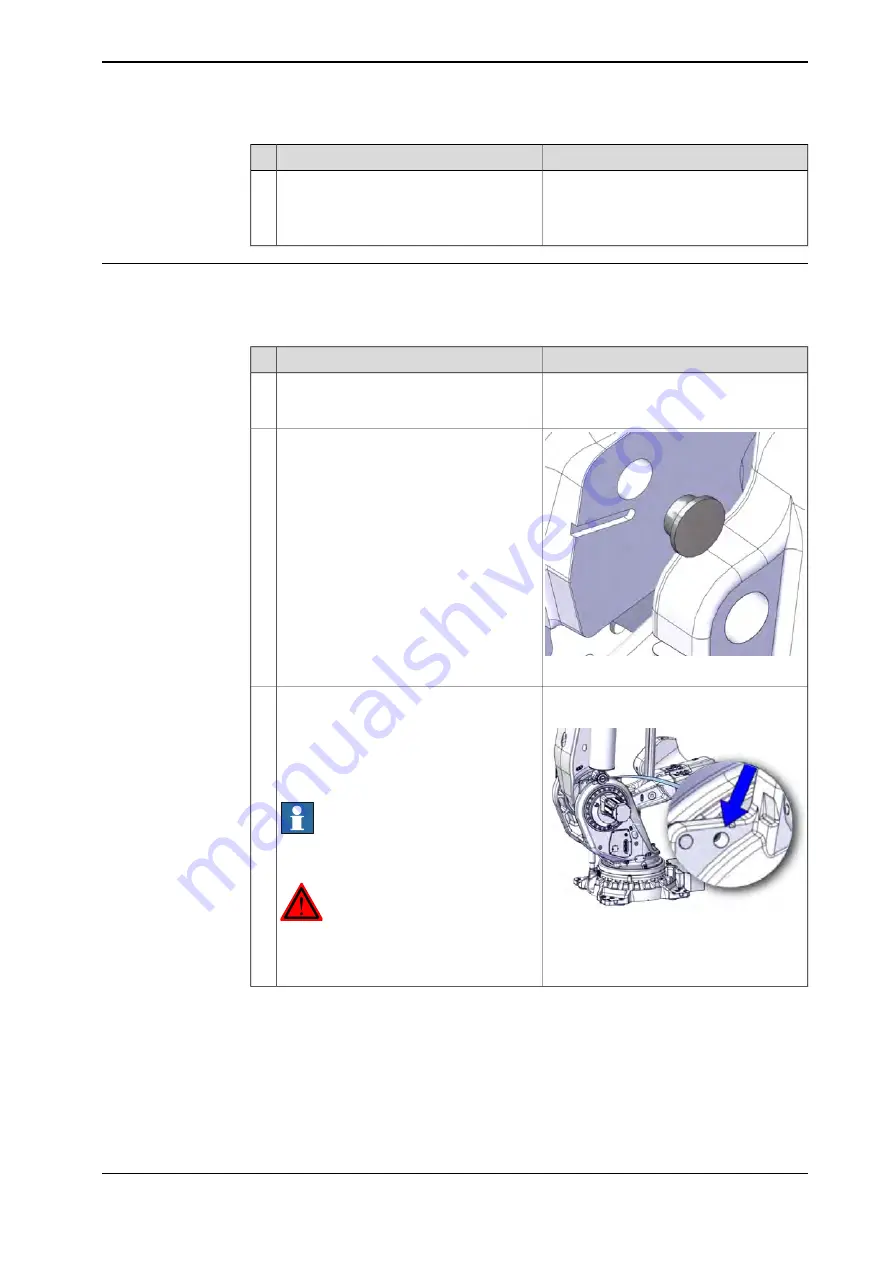
1
xx1500002366
Valid for replacement of the axis-2 motor.
Remove the plastic plug from the lower
arm.
If needed, jog the robot so that the plug is
accessible.
2
Lock screw, quality 12.9, M20x150
Valid for replacement of the axis-2 motor.
3
Tightening torque: 100 Nm
xx1500002322
Insert the lock screw through the frame and
into the hole in the lower arm, to secure the
weight of the lower arm.
If needed, adjust the position of axis 2 to
make it possible to insert the lock screw.
Note
Tighten the lock screw manually. No tools
needed.
DANGER
Failure to secure the weight of the lower
arm, will cause the lower arm to fall when
the brakes of the axis-2 motor are released.
Continues on next page
Product manual - IRB 8700
577
3HAC052853-001 Revision: F
© Copyright 2015-2018 ABB. All rights reserved.
4 Repair
4.7.2 Replacing the axis-2 and axis-3 motors
Continued
Summary of Contents for IRC5 Compact
Page 1: ...ROBOTICS Product manual IRB 8700 ...
Page 16: ...This page is intentionally left blank ...
Page 824: ...This page is intentionally left blank ...
Page 838: ...This page is intentionally left blank ...
Page 840: ...This page is intentionally left blank ...
Page 846: ......
Page 847: ......







































































