



























2.3.3 Keeping track of history
Make a historical fault log!
In some cases, a particular installation may give rise to faults not encountered in
others. Therefore, charting each installation may give tremendous assistance to
the troubleshooter.
To facilitate troubleshooting, a log of the circumstances surrounding the fault gives
the following advantages:
•
it enables the troubleshooter to see patterns in causes and consequences
not apparent at each individual fault occurrence
•
it may point out a specific event always taking place just before the fault, for
example a certain part of the work cycle being run.
Check up the history!
Make sure you always consult the historical log if it is used. Also remember to
consult the operator, or similar, who was working when the problem first occurred.
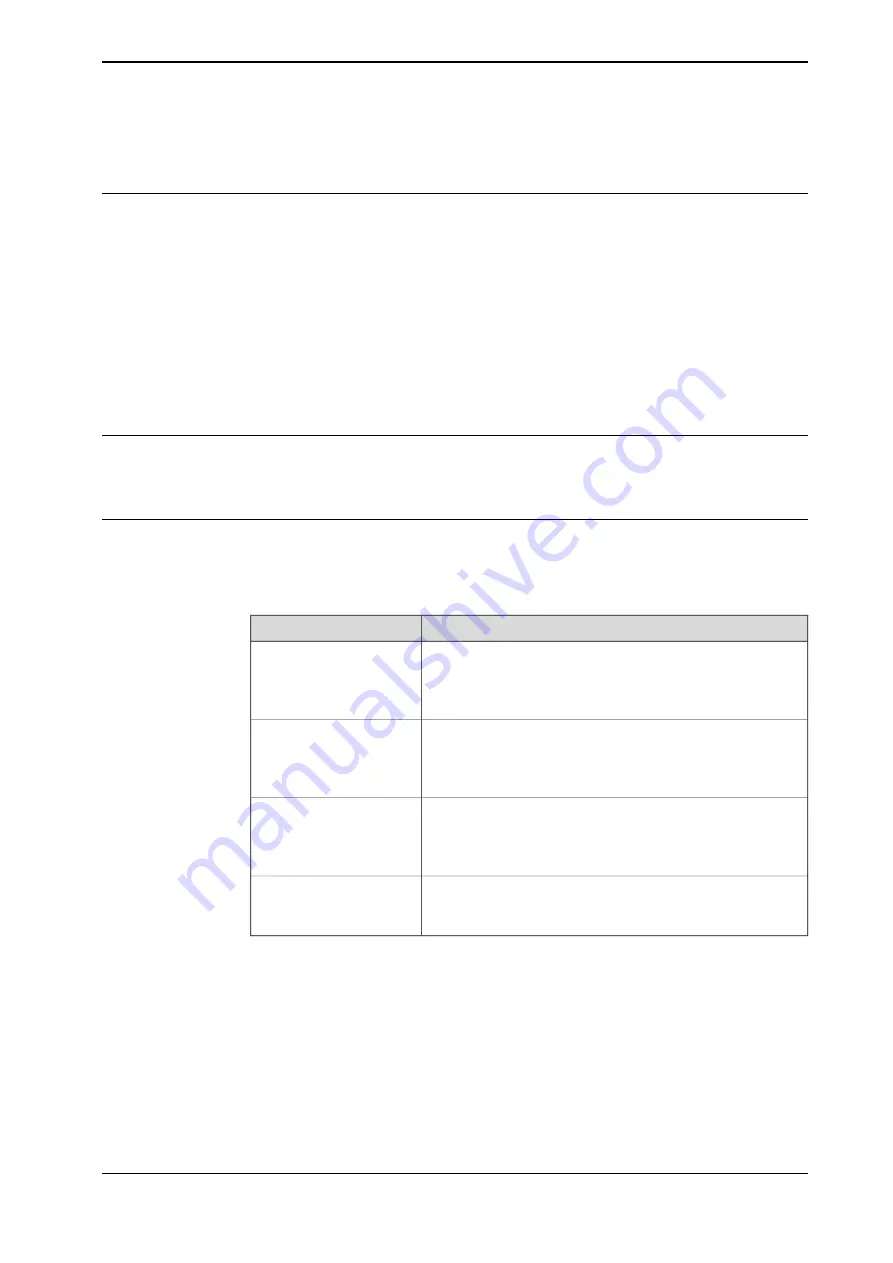
At what stage did the fault occur?
What to look for during troubleshooting depends greatly of when the fault occurred:
was the robot just freshly installed? Was it recently repaired?
The table gives specific hints to what to look for in specific situations:
then:
If the system has just:
Check:
•
the configuration files
•
connections
•
options and their configuration
been installed
Check:
•
all connections to the replaced part
•
power supplies
•
that the correct part has been fitted
been repaired
Check:
•
software versions
•
compatibilities between hardware and software
•
options and their configuration
had a software upgrade
Check:
•
connections
•
software versions
been moved from one site
to another (an already
working robot)
Operating manual - Troubleshooting IRC5
37
3HAC020738-001 Revision: AA
© Copyright 2005-2018 ABB. All rights reserved.
2 Introduction to troubleshooting
2.3.3 Keeping track of history
Summary of Contents for IRC5 Compact
Page 1: ...ROBOTICS Operating manual Troubleshooting IRC5 ...
Page 10: ...This page is intentionally left blank ...
Page 40: ...This page is intentionally left blank ...
Page 90: ...This page is intentionally left blank ...
Page 586: ...This page is intentionally left blank ...
Page 588: ......
Page 589: ......







































































