





























6.6 Checking the synchronization position
Introduction
Check the synchronization position of the robot before beginning any programming
of the robot system. This may be done:
•
Using the
Jogging
window on the FlexPendant.
Using the jogging window
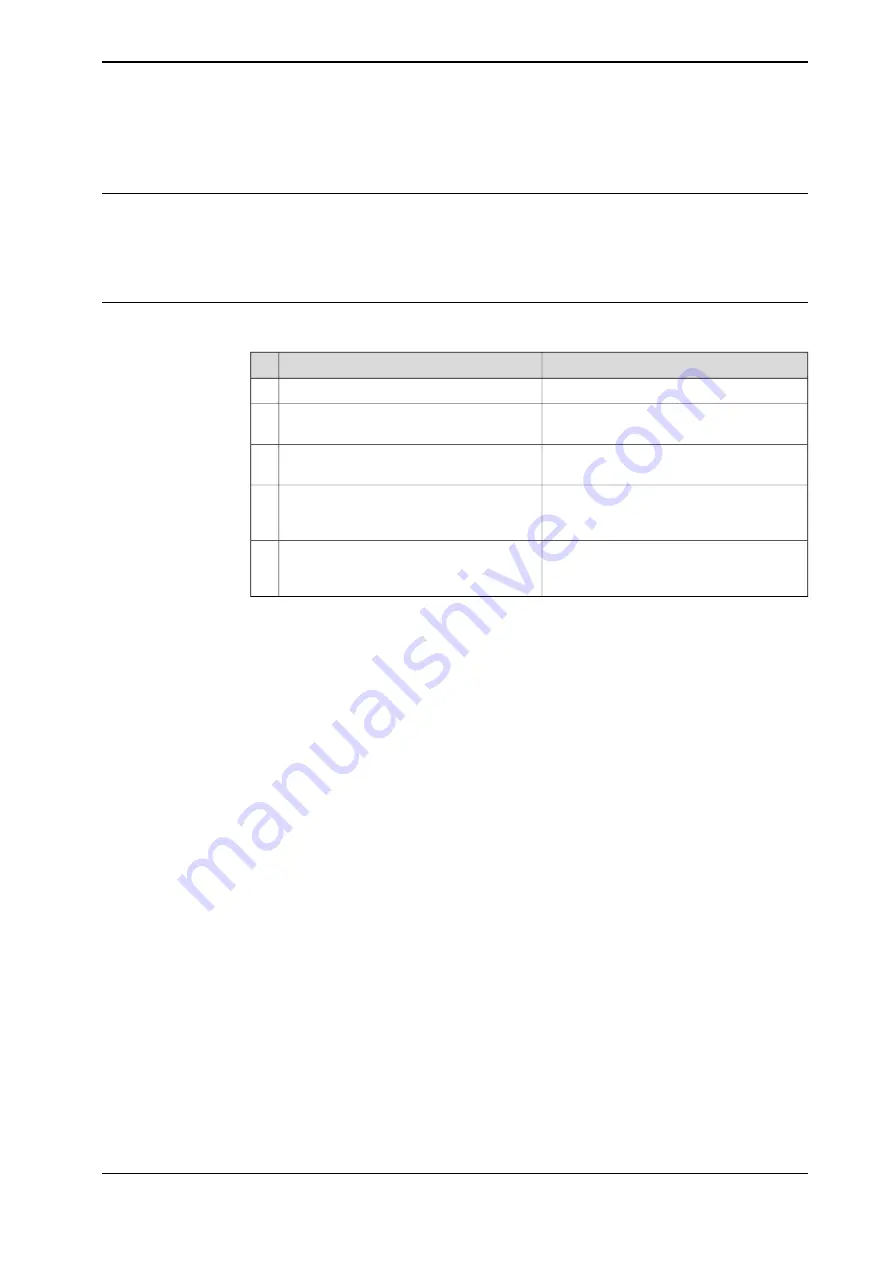
Use this procedure to jog the robot to the synchronization position of all axes.
Note
Action
On the
ABB
menu, tap
Jogging
.
1
Tap
Motion mode
to select group of axes
to jog.
2
Tap to select the axis to jog, axis 1, 2, or
3.
3
Manually run the track axes to a position
where the axis position value read on the
FlexPendant, is equal to zero.
4
See
Synchronization marks and track mo-
tion movement directions on page 338
Check that the synchronization marks for
the axes align correctly. If they do not, up-
date the revolution counters.
5
Product manual - IRT 710
359
3HKA00000186299-001 Revision: B
© Copyright 2023 ABB. All rights reserved.
6 Calibration
6.6 Checking the synchronization position
Summary of Contents for IRT 710
Page 1: ...ROBOTICS Product manual IRT 710 ...
Page 14: ...This page is intentionally left blank ...
Page 58: ...This page is intentionally left blank ...
Page 84: ...This page is intentionally left blank ...
Page 360: ...This page is intentionally left blank ...
Page 364: ...This page is intentionally left blank ...
Page 378: ...This page is intentionally left blank ...
Page 380: ...This page is intentionally left blank ...
Page 383: ......







































































