





























Value
Description
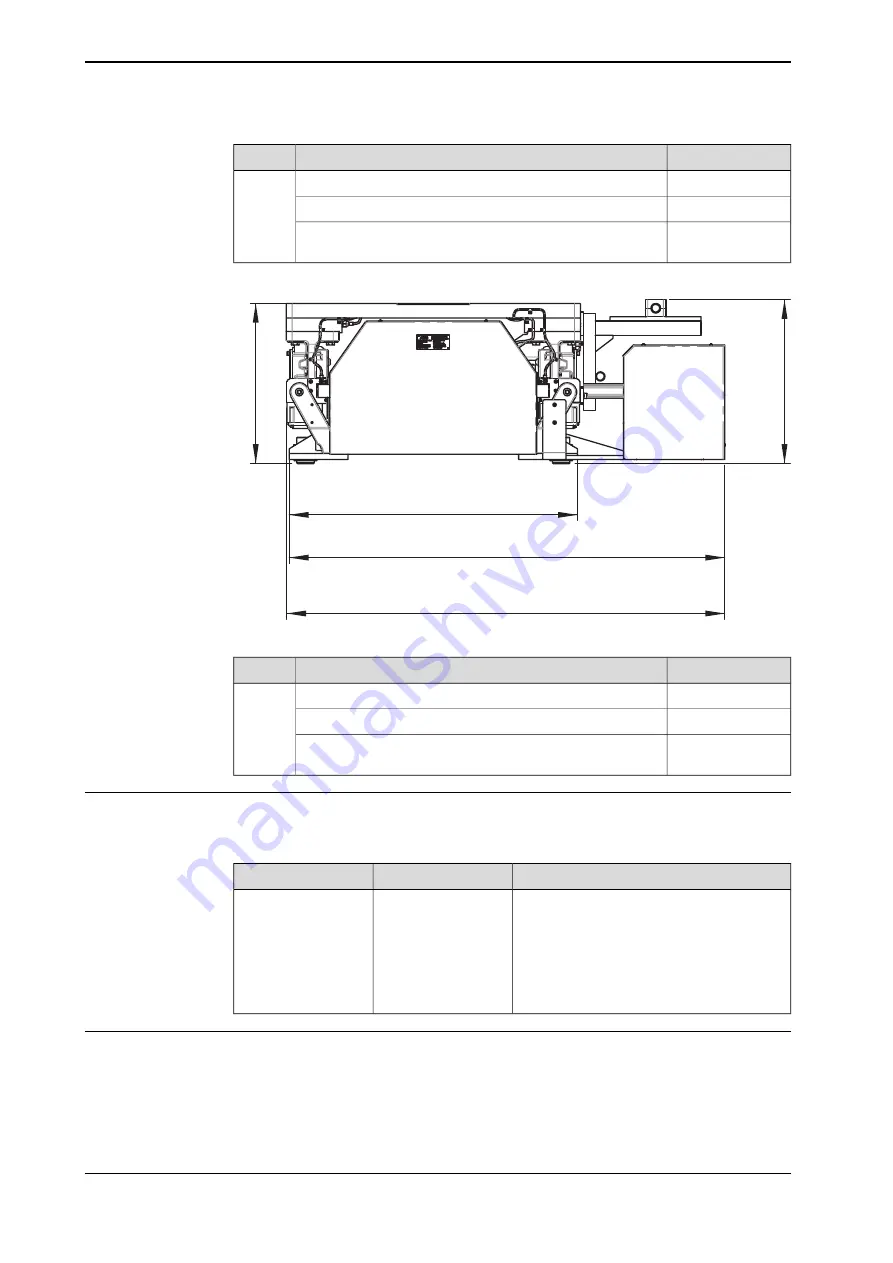
Item
527 mm
For transfer carriage
a
530 mm
For IRB 4600/IRB 4400
545 mm
For IRB 460/IRB 660/IRB 760/IRB 6620/IRB 6650S/IRB
6660/IRB 6700/IRB 7600
With external cable chain
a
980.00
1484.00
1489.50
558.00
xx2200000400
Value
Description
Item
527 mm
For transfer carriage
a
530 mm
For IRB 4600/IRB 4400
545 mm
For IRB 460/IRB 660/IRB 760/IRB 6620/IRB 6650S/IRB
6660/IRB 6700/IRB 7600
Requirements, foundation
The table shows the requirements for the foundation where the weight of the
installed robot is included:
Note
Value
Requirement
Flat foundations give better repeatability of
the resolver calibration compared to original
settings on delivery from ABB.
1 mm/m (movement
direction)
0.5 mm/m (Perpendic-
ular to movement dir-
ection)
Flatness of foundation
surface
The value for levelness aims at the circum-
stance of the anchoring points in the robot
base.
Overall height differ-
ence ≤ 10 mm
Mechanical stops
There are no adjustable mechanical stops on the IRT 710. This needs to be
considered while doing a risk assessment of the complete installation, the track
can however be order in different lengths.
Continues on next page
60
Product manual - IRT 710
3HKA00000186299-001 Revision: B
© Copyright 2023 ABB. All rights reserved.
2 Technical data
2.1 Technical data
Continued
Summary of Contents for IRT 710
Page 1: ...ROBOTICS Product manual IRT 710 ...
Page 14: ...This page is intentionally left blank ...
Page 58: ...This page is intentionally left blank ...
Page 84: ...This page is intentionally left blank ...
Page 360: ...This page is intentionally left blank ...
Page 364: ...This page is intentionally left blank ...
Page 378: ...This page is intentionally left blank ...
Page 380: ...This page is intentionally left blank ...
Page 383: ......






































































