





























OI-LLT100-EN Rev. D |
User Guide
23
7 Configuring filtering
The LLT100 filtering feature is designed stabilize measurements
by filtering out extraneous data that could negatively impact
the resolution of the measured level (spikes, obstructions in
the beam by mixer blades, lack of signal, etc.).
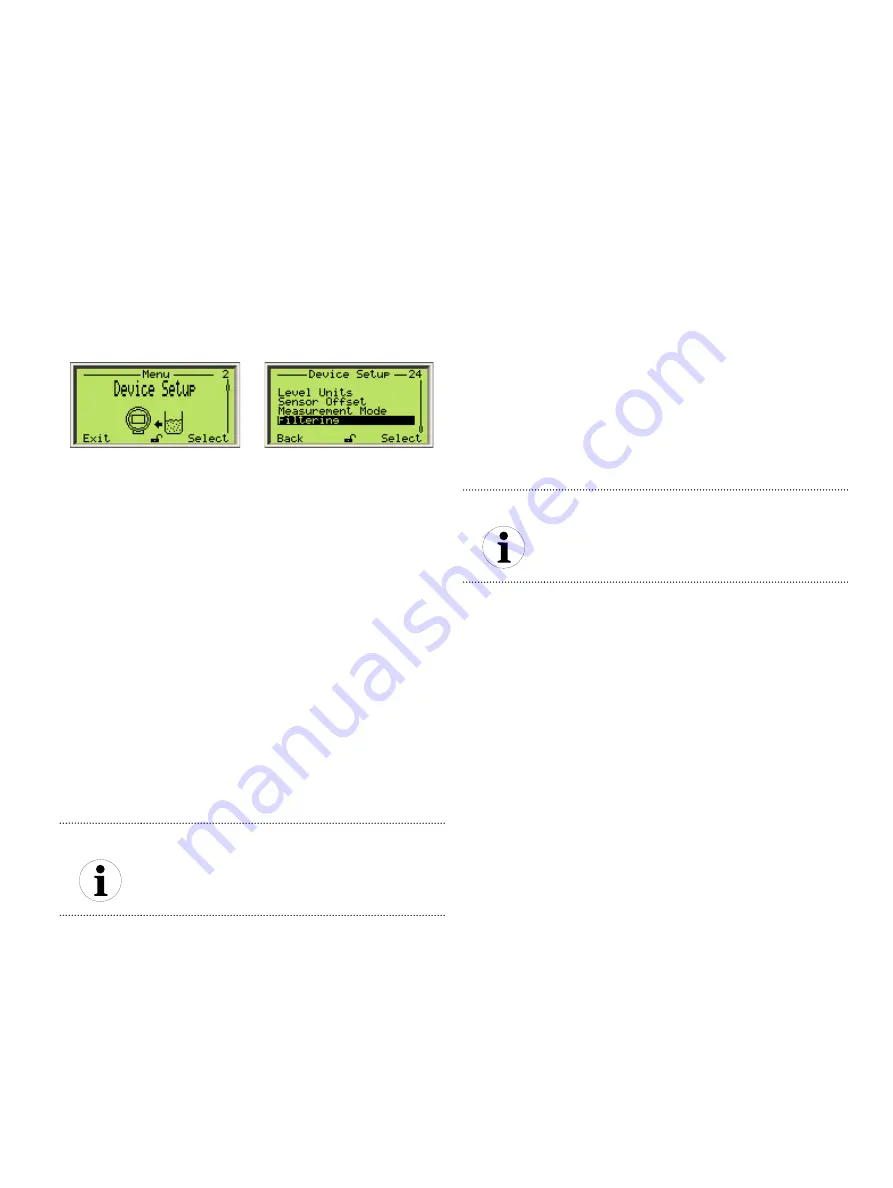
Figure 18
Accessing the
Filtering
menu
The various filters available are applied in a sequence as follows:
No-Measurement period — Median filter — Fill/Drain rates —
Damping
7.1 Setting the rate unit
For rate-based filters, you first need to set a rate unit.
To do so:
1. From the
Device Setup
menu, select
Filtering > Rate Unit
.
2. Select the appropriate rate unit (
m/hr
or
ft/m
), and press
OK
.
7.2 Configuring a No Measurement period
The No Measurement period feature is a configurable amount
of time during which the sensor, in the absence of reliable
measurements, predicts the level based on the current trend
and/or filling rate. If no filling or drainage rate is selected, the
last level measured is kept for the time period entered. After
this time period elapses, a lost target alarm is triggered.
NOTICE
If the filling rate filter option is enabled, the sensor will
use the filling rate to predict the level measurement.
Otherwise, it will predict the level using the estimated
current trend.
This feature is useful for processes in which the laser beam
can be temporarily obstructed (by agitators, rotating blades,
etc.), absorbed or lost, and for applications where dust or
vapor can severely decrease the visibility of the level surface.
7.2.1 Enabling the No Measurement period
To do so:
1. From the
Device Setup
menu, select
Filtering > No
Measurement Period > Enable
.
2. From the
Enable
menu, select whether or not you want to
enable the filter, and press
OK
.
7.2.2 Setting the No Measurement period
To do so:
1. From the
Device Setup
menu, select
Filtering > No
Measurement Period > Period
.
2. From the
Period
menu, edit the No Measurement period as
necessary (between 2 s and 99,999 s), and press
OK.
For dust or vapor applications, enter a period corresponding
to the typical surface obscuration time.
For agitated applications, a value of about 10 s should be
enough to guarantee a good level reading stability.
NOTICE
After the No Measurement period has elapsed, if no
reliable measurement is detected, the sensor will
produce a TARGET LOST error (see “Troubleshooting
and service” on page 41.
7.3 Configuring the median filter
Processes can induce noise in level measurements.
The median filter is designed to filter out noisy measurement
spikes in applications with fast transients (e.g., rapidly
varying processes, positioning applications, etc). It is used
for discarding occasional false measurements resulting from
temporary laser beam obstruction, or from any other occasional
unwanted reflection that might occur in the process.
The value entered corresponds to the number of measurements
kept in the buffer. The filter then generates and returns a
median value of all the measurements kept in the buffer. The
buffer size can range from 2 to 25 measurements.
7.3.1 Enabling the median filter
To do so:
1. From the
Device Setup
menu, select
Filtering > Median
Filter > Enable
.
2. From the
Enable
menu, select whether or not you want to
enable the filter, and press
OK
.
7.3.2 Setting the median filter buffer size
To do so:
1. From the
Device Setup
menu, select
Filtering > Median
Filter > Size
.
2. From the
Size
menu, edit the number of measurements that
you want kept in the filter buffer (between 2 and 25), and
press
OK
.
Summary of Contents for LLT100
Page 8: ...This page intentionally left blank ...
Page 10: ...This page intentionally left blank ...
Page 18: ...This page intentionally left blank ...
Page 22: ...This page intentionally left blank ...
Page 26: ...This page intentionally left blank ...
Page 44: ...This page intentionally left blank ...
Page 50: ...This page intentionally left blank ...
Page 66: ...This page intentionally left blank ...
Page 67: ......



































































