
























Document ID
Document name
3HAC032104-001
Operating manual - RobotStudio
3HAC065036-001
Operating manual - OmniCore
3HAC065037-001
Operating manual - Integrator's guide OmniCore
Document.ID-1
Application manual - Product.ProductName
3HAC065041-001
Technical reference manual - System parameters
3HAC028879-001
Application manual - Connected Services
3HAC031045-001
Safety manual for robot - Manipulator and IRC5 or OmniCore con-
troller
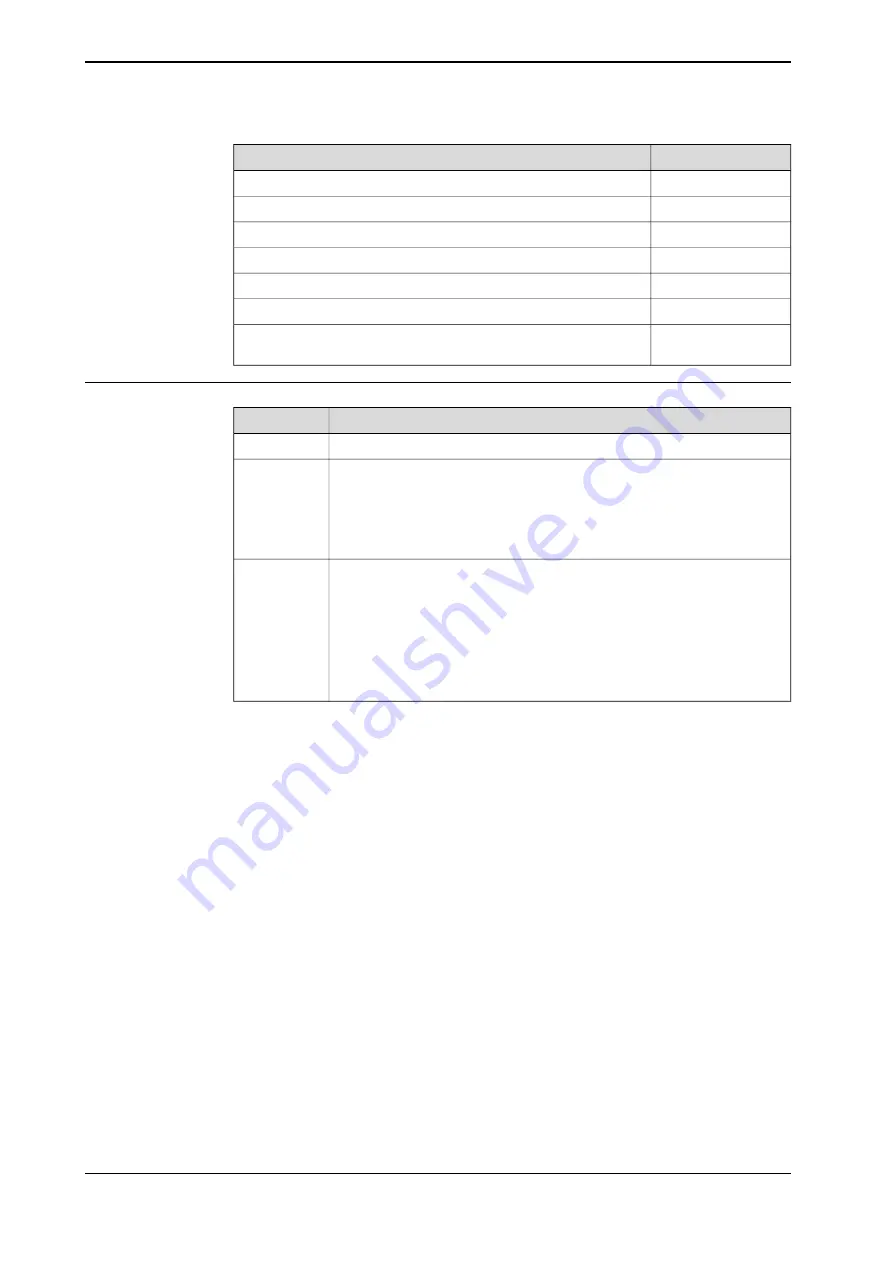
Revisions
Description
Revision
First edition.
A
Published in release 21D. The following updates are made in this revision:
•
Added supported robot IRB 1200, 910INV and 920.
•
Updated structure in section
Descriptions for connectors on page 85
•
Updated structure in section
.
•
Updated the section
Ethernet networks on OmniCore on page 79
B
Published in release 22A. The following updates are made in this revision:
•
Added information on decoupling ES output and ES input, see
scriptions for connectors on page 85
, and
•
Information about I/O Network added in section
.
•
Updated safety data, see
Safety functions and safety related data
C
10
Product manual - OmniCore E10
3HAC079399-001 Revision: C
© Copyright 2019-2022 ABB. All rights reserved.
Overview of this manual
Continued
Summary of Contents for OmniCore E10
Page 1: ...ROBOTICS Product manual OmniCore E10 ...
Page 8: ...This page is intentionally left blank ...
Page 34: ...This page is intentionally left blank ...
Page 198: ...This page is intentionally left blank ...
Page 206: ...This page is intentionally left blank ...
Page 224: ...This page is intentionally left blank ...
Page 228: ......
Page 229: ......






























































