




























6.2.4 Problem releasing the robot brakes
Description
When starting robot operation or jogging the robot, the internal robot brakes must
release in order to allow movement.
Required test equipment
Equipment needed for troubleshooting:
Note
Equipment
Multimeter
Insulating gloves
3HAC076810-008
Circuit diagram - OmniCore E10
Preparations
Action
Make sure that the controller is switched on.
1
Wait 30 s - 1 min to enable start-up sequence.
Check the FlexPendant for errors and warnings.
2
DANGER
Troubleshooting on the controller while powered on must be performed by personnel
trained by ABB or by ABB field engineers.
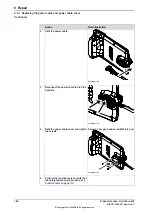
Recommended working procedure
If the brakes do not release, no robot movement is possible and a number of error
log messages can occur. Use this procedure to troubleshoot what might cause the
problem.
Look at the following block diagram to understand how power is connected from
incoming and forward.
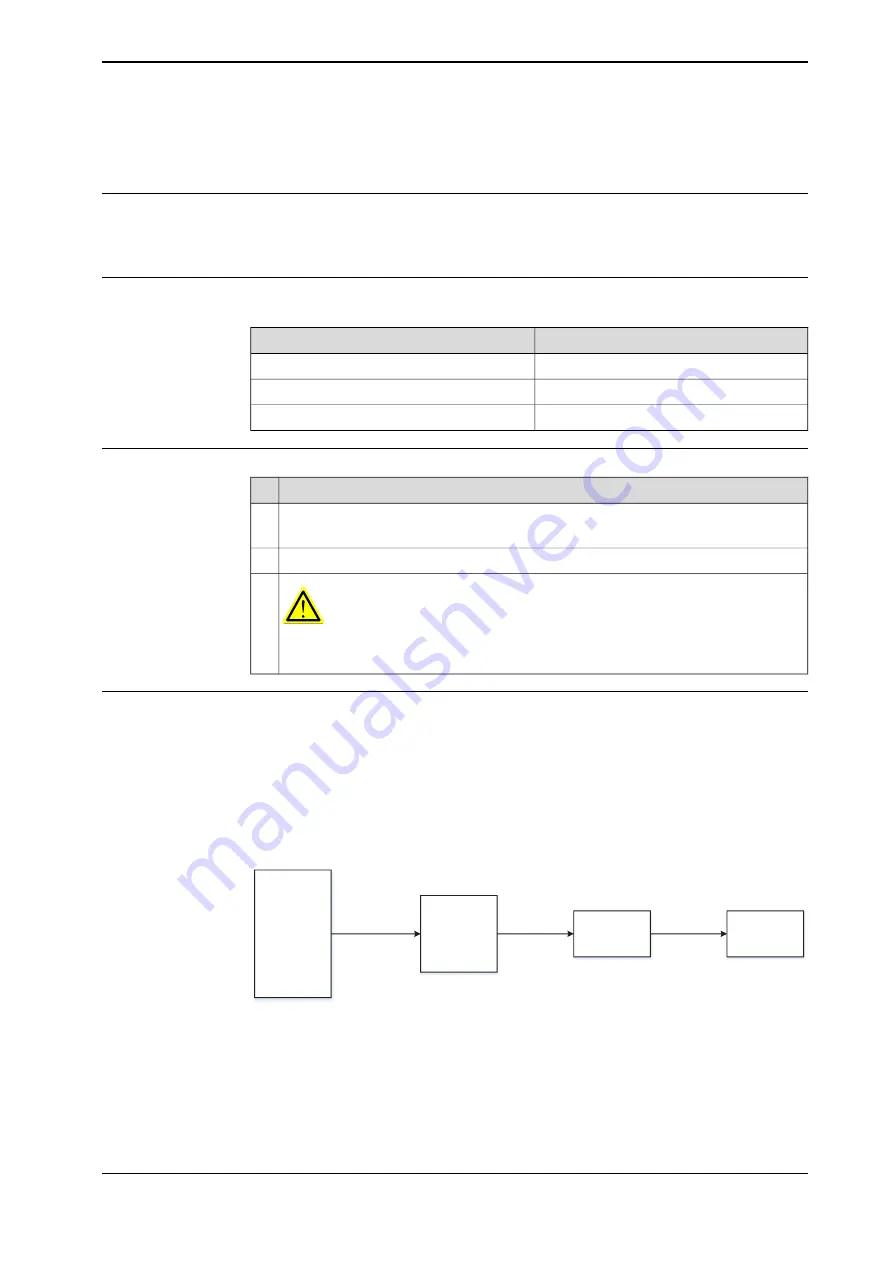
Block diagram
Drive Unit
T4
Motor connector
X1
Manipulator
Power Unit
A1
2
4
V
_
BR
A
KE_
P
WR
Brake signal
Floor cable
X11
X13
X15
xx2100001557
Continues on next page
Product manual - OmniCore E10
173
3HAC079399-001 Revision: C
© Copyright 2019-2022 ABB. All rights reserved.
6 Troubleshooting
6.2.4 Problem releasing the robot brakes
Summary of Contents for OmniCore E10
Page 1: ...ROBOTICS Product manual OmniCore E10 ...
Page 8: ...This page is intentionally left blank ...
Page 34: ...This page is intentionally left blank ...
Page 198: ...This page is intentionally left blank ...
Page 206: ...This page is intentionally left blank ...
Page 224: ...This page is intentionally left blank ...
Page 228: ......
Page 229: ......







































































