




























Note
Action
xx1300000668
Tip
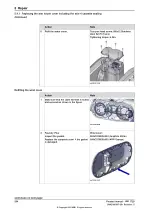
Use tape and tie the axis-5 and axis-6
connectors and carrier into a bundle (if not
already done). This is done to facilitate the
procedure and to avoid damaging the parts
during the procedure.
This will also make it easier to run the cable
harness through the inside of the robot.
2
Person 1, working at the back:
Run the cable harness through the cable
guide and then into and through the upper
arm tube.
Tip
This step is best performed by two persons
working together:
•
Person 1: Put one hand inside the
side hole of the arm tube and take
a hold of the cable harness.
•
Person 2: Take a hold on the cable
harness at the back of the robot.
•
Together: Use caution and move the
cable harness into the arm tube.
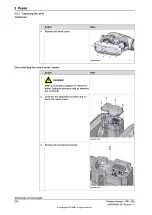
3
xx2300000039
Person 2, working at the side hole:
xx2300000040
Note
The cable harness is best placed at the
upper right hand side of the DressPack
tube, if used, through the arm tube.
Do not run the cable harness into the
DressPack tube!
Note
Do not run the cable harness into the
DressPack tube, if one is fitted!
xx1300000820
Continues on next page
Product manual - IRB 6720
255
3HAC085697-001 Revision: C
© Copyright 2023 ABB. All rights reserved.
5 Repair
5.4.1 Replacing the arm house cover including the axis-4 cassette sealing
Continued
Summary of Contents for OmniCore IRB 6720
Page 1: ...ROBOTICS Product manual IRB 6720...
Page 8: ...This page is intentionally left blank...
Page 14: ...This page is intentionally left blank...
Page 54: ...This page is intentionally left blank...
Page 184: ...This page is intentionally left blank...
Page 584: ...This page is intentionally left blank...
Page 608: ...This page is intentionally left blank...
Page 614: ...This page is intentionally left blank...
Page 639: ......







































































