


























Note
Action
xx2300001210
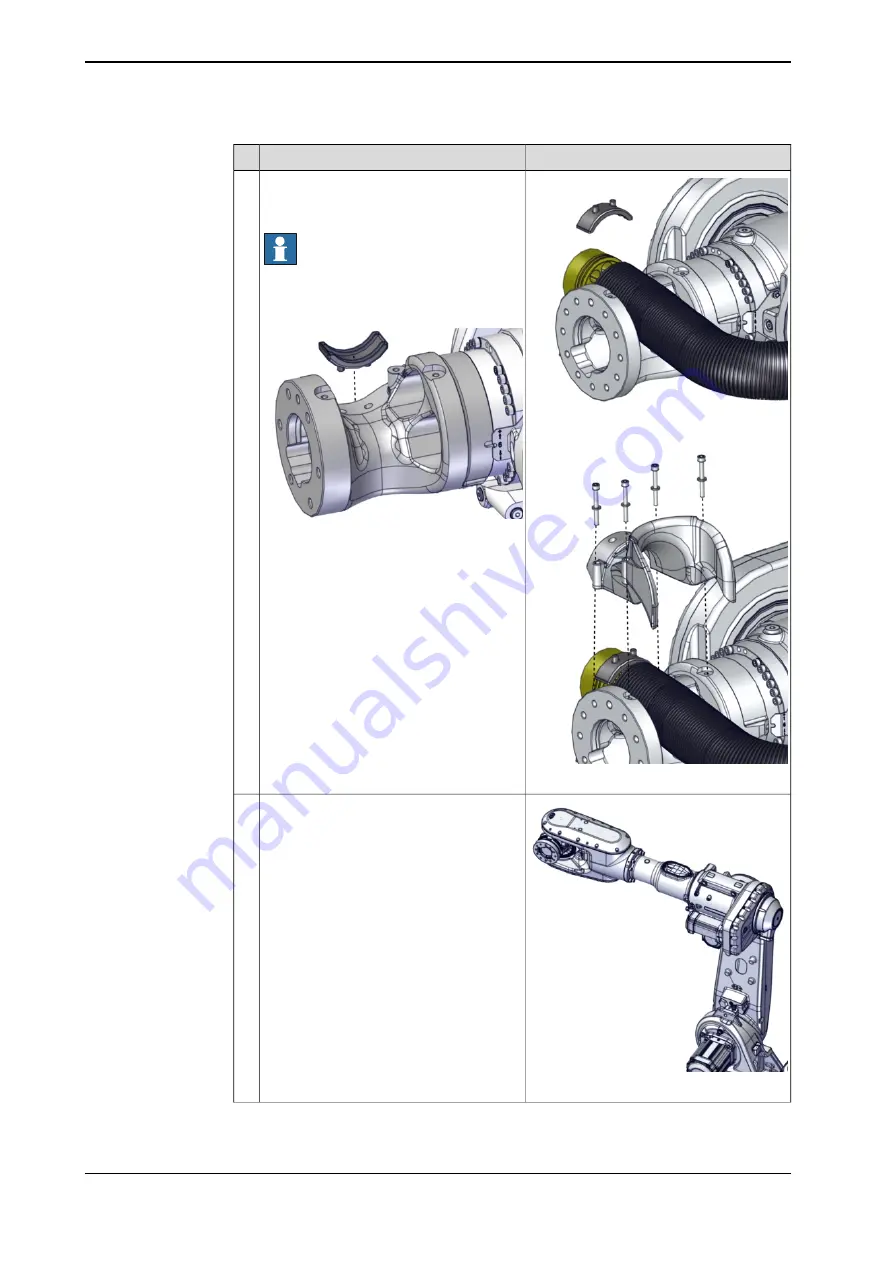
If used, open the DressPack axis-6 cable
support and remove the DressPack cable
package from the process turning disk.
Note
Use caution not to lose the two clamp jaws
on either side of the DressPack cable
package.
xx2100002712
3
xx2300001211
xx2100002164
Jog the robot into position:
•
Axis 1: no significance
•
Axis 2: jog axis 2 and 3 to a position
where the upper arm is horizontal
•
Axis 3: jog axis 2 and 3 to a position
where the upper arm is horizontal
•
Axis 4: +90°
•
Axis 5: +90°
•
Axis 6: no significance
4
Continues on next page
268
Product manual - IRB 6720
3HAC085697-001 Revision: C
© Copyright 2023 ABB. All rights reserved.
5 Repair
5.5.1 Replacing the wrist
Continued
Summary of Contents for OmniCore IRB 6720
Page 1: ...ROBOTICS Product manual IRB 6720...
Page 8: ...This page is intentionally left blank...
Page 14: ...This page is intentionally left blank...
Page 54: ...This page is intentionally left blank...
Page 184: ...This page is intentionally left blank...
Page 584: ...This page is intentionally left blank...
Page 608: ...This page is intentionally left blank...
Page 614: ...This page is intentionally left blank...
Page 639: ......
































































