





























Note
Action
Lifting shackle: SA-10-8-NA1
Connect the two roundslings with a shackle.
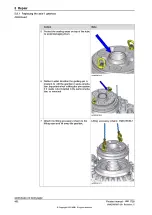
6
xx2200001525
Turn on the power to the robot and jog axis-3
slowly until the roundsling is stretched (approxim-
ately +65°), to carry the weight of the lower arm
and frame.
WARNING
Without the roundsling the weight of the lower
arm and frame is applied to the axis-3 gear during
lifting, which risks to damage the gear.
7
DANGER
Turn off all:
•
electric power supply
•
hydraulic pressure supply
•
air pressure supply
to the robot, before entering the safeguarded
space.
8
Lifting eye: 3HAC16131-1
Fit a lifting eye in the arm house, with a fender
washer underneath.
9
Fender washer. Outer diameter:
minimum 26 mm, maximum 30 mm,
hole diameter: 13 mm, thickness:
3 mm.
xx1400002196
Fender washer
xx2100002146
Continues on next page
438
Product manual - IRB 6720
3HAC085697-001 Revision: C
© Copyright 2023 ABB. All rights reserved.
5 Repair
5.8.1 Replacing the axis-1 gearbox
Continued
Summary of Contents for OmniCore IRB 6720
Page 1: ...ROBOTICS Product manual IRB 6720...
Page 8: ...This page is intentionally left blank...
Page 14: ...This page is intentionally left blank...
Page 54: ...This page is intentionally left blank...
Page 184: ...This page is intentionally left blank...
Page 584: ...This page is intentionally left blank...
Page 608: ...This page is intentionally left blank...
Page 614: ...This page is intentionally left blank...
Page 639: ......



































































