




























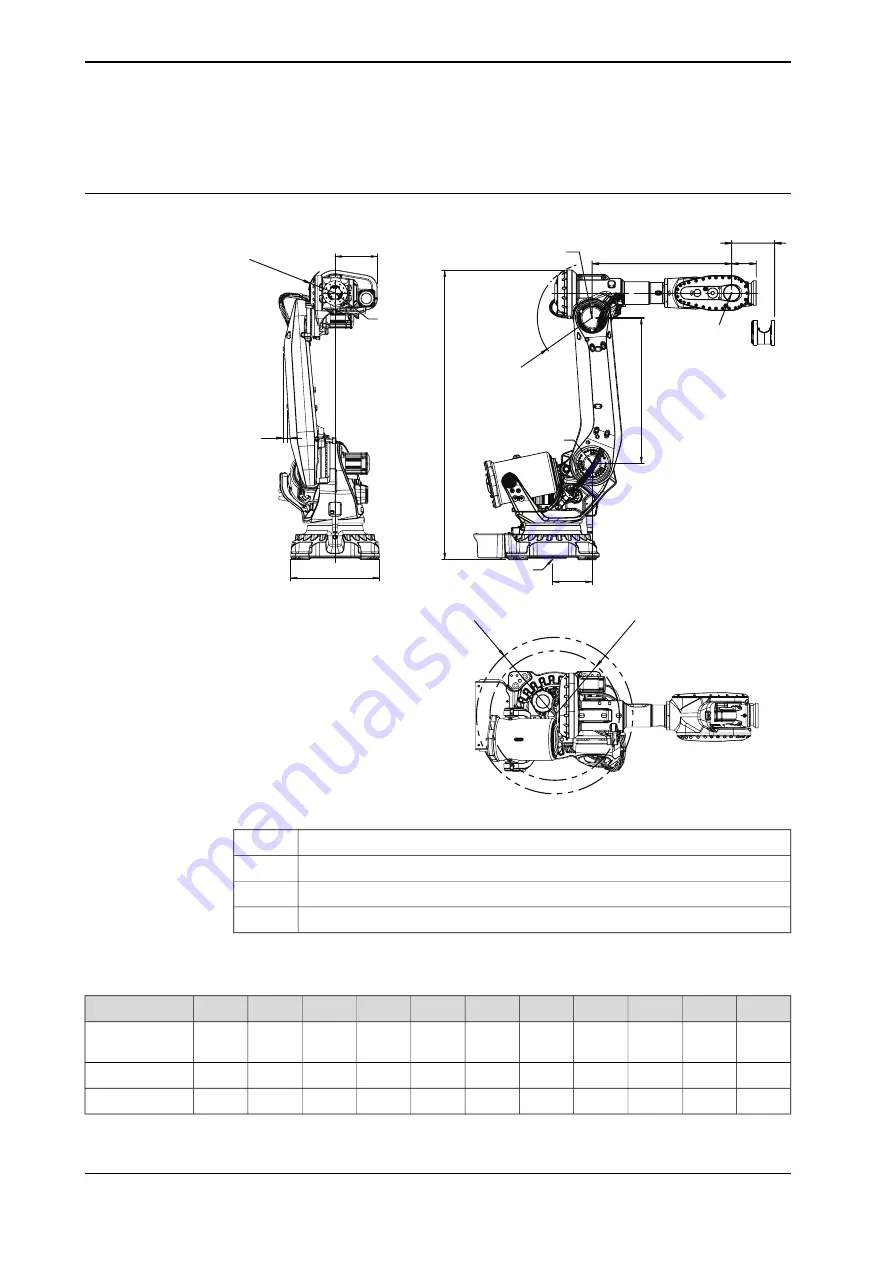
3.3.7 Fitting equipment on the robot (robot dimensions)
Robot dimensions
A
C
C (LID)
B
D
E
R3
Axis 1
Axis 2
Axis 5
Axis 3
R1a
R1b
F
G
J
R4
Axis 4
Axis 6
xx2200002031
Smallest circumscribed radius around axis 1 (back side)
R1a
Smallest circumscribed radius around axis 1 (front side)
R1b
Smallest circumscribed radius around axis 3
R3
Smallest circumscribed radius around axis 4
R4
Measurements
The measurements are given in mm.
R4
R3
R1b
R1a
G
F
E
D
C
B
A
Variant
216
446
525
634
30
345
320
1,185
200
1,132.5
2,351.5
IRB 6720-
240/2.65
216
446
525
634
24
345
320
1,286
200
1,182.5
2,452.5
IRB 6720-210/2.8
216
446
525
634
24
345
320
1,286
200
1,485.5
2,452.5
IRB 6720-170/3.1
Continues on next page
82
Product manual - IRB 6720
3HAC085697-001 Revision: C
© Copyright 2023 ABB. All rights reserved.
3 Installation and commissioning
3.3.7 Fitting equipment on the robot (robot dimensions)
Summary of Contents for OmniCore IRB 6720
Page 1: ...ROBOTICS Product manual IRB 6720...
Page 8: ...This page is intentionally left blank...
Page 14: ...This page is intentionally left blank...
Page 54: ...This page is intentionally left blank...
Page 184: ...This page is intentionally left blank...
Page 584: ...This page is intentionally left blank...
Page 608: ...This page is intentionally left blank...
Page 614: ...This page is intentionally left blank...
Page 639: ......







































































