





























117
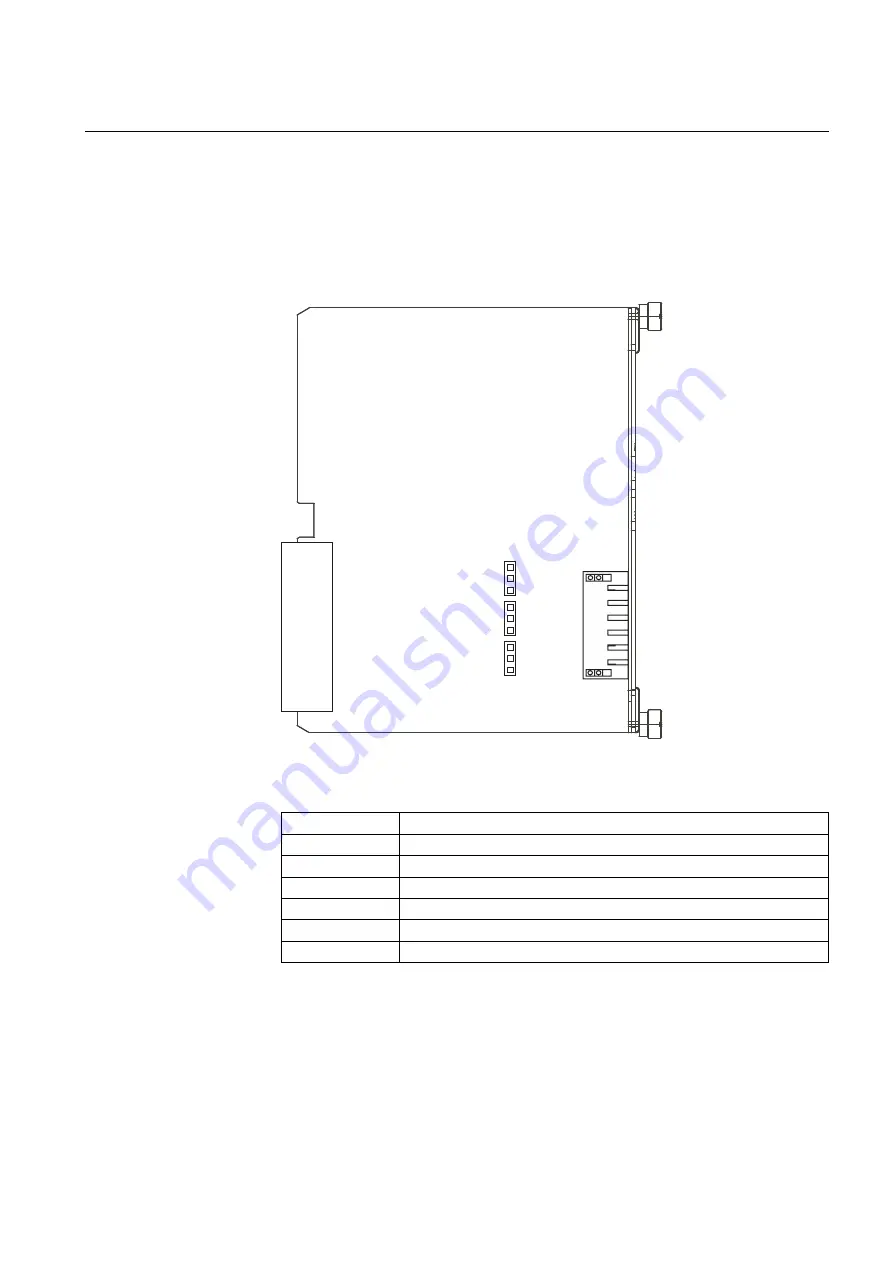
The bus is to be biased at one end to ensure fail-safe operation, which can be done
using the pull-up and pull-down resistors on the communication module. The pull-
up and pull-down resistors are selected by setting jumpers X3 and X4 to the ON
position.
The jumpers have been set to no termination (X5 in the OFF position) and no
biasing (X3 and X4 in the OFF position) as default.
X3
X4
X5
off
on
off
on
off
on
A040334
Fig. 5.2.2.-1
Jumper location on the RS-485 communication module
Table 5.2.2.-2
RS-485 rear connector
Terminal
Function
X5.5-6
Data A (+)
X5.5-5
Data B (-)
X5.5-4
Signal GND (for potential balancing)
X5.5-3
-
X5.5-2
Shield GND (via capacitor)
X5.5-1
Shield GND
Combined fibre-optic connection (plastic and glass)
If the relay is provided with the optional fibre-optic communication module for
plastic and glass fibre, the plastic fibre-optic cables are connected to terminals X5.3-
RX (Receiver) and X5.3-TX (Transmitter) and the glass fibre-optic cables to
terminals X5.4-RX (Receiver) and X5.4-TX (Transmitter).
Motor Protection Relay
Technical Reference Manual - ANSI Version
REM 610
REM 610
1MRS755537
Summary of Contents for REM 610
Page 1: ...Motor Protection Relay REM 610 REM 610 Technical Reference Manual ANSI Version ...
Page 2: ......
Page 6: ...6 ...
Page 8: ...8 ...
Page 12: ...12 ...
Page 124: ...124 ...
Page 144: ...144 ...
Page 154: ...154 ...
Page 157: ......







































































