





























- 119 -
UMC100-FBP
Universal Motor Controller
UMC100-FBP
Technical Description
FieldBusPlug / Issue: 03.2012
Accessing Data on PROFIBUS
On PROFIBUS the device parameters, monitoring data and the command data size is described in the
GSD file and mapped to the data telegrams cyclically exchanged between the PROFIBUS master and
the UMC. The diagnosis data is transferred if needed via the extended PROFIBUS diagnosis also de-
scribed in the GSD file. Device parameters are transferred in one block during bus start or UMC start
from the PROFIBUS master to the UMC. See also the sections "Configuring the Fieldbus Configuration"
and "Commissioning->Configuration from within the control system". The PROFIBUS plugs must meet at
least the following requirements:
- PDP22 with index F or later (produced since 12/08)
- PDQ22 with index A6 or later (produced since 12/09)
Accessing Data on Modbus
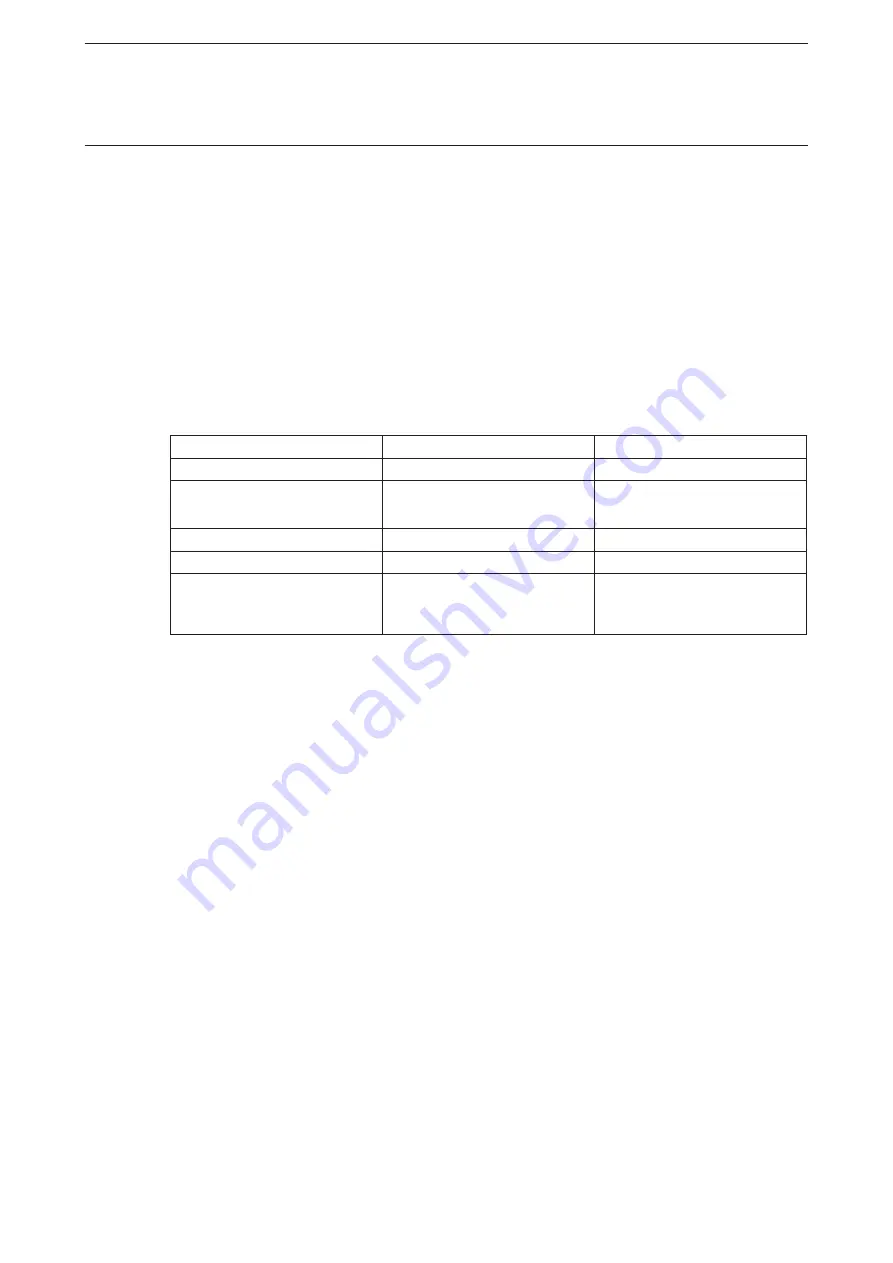
On Modbus the data is provided in so-called registers. A Modbus master can read and write data on
these registers. UMC data is accessible on the following registers:
Modbus Function Code
Register Address
Content
1
0x0000
Monitoring Data Bytes 0,1
3
0x0200 (hex)
Monitoring Data Words 1 - 7.
Plesae note that words 6 and 7 contain
binary data but are read as words!
15
0x0100 (hex)
Command Data Bytes 0,1,2,3
16
0x0300 (hex)
Command Data Words 1 - 5
3
0x2000 (hex)
Diagnosis Data
Plesae note that diagnosis data is
transmitted as words but contains bit
information!
For more information about integrating the UMC in a Modbus network please refer to the MRP21-FBP
(Modbus plug) technical manual.
Accessing Data on DeviceNet
On DeviceNet the device parameters, monitoring data and the command data size is described in the
EDS file. Monitoring, command and diagnosis data is mapped to the data telegrams which are cyclically
exchanged between the DeviceNet master and the UMC. For more information about device parameteri-
sation in DeviceNet networks please refer to the DNP21-FBP (DeviceNet plug) technical manual.
Accessing Data on CANopen
On CANopen the device parameters, monitoring data and the command data size is described in the
CANopen EDS file.
By default
•
command data is mapped to RPDO1 for binary data and RPDO3 for analogue data.
•
monitoring data is mapped to TPDO1 for binary byte 0 and 1
•
analogue monitoring data words 1-5 are mapped to TPDO3/4 . In addition the remaining binary data
(byte 12 - 15) are mapped to TPDO4 too!
Parameters can be set/read using SDO (Service Data Object) communication.
For more information about the CANopen FieldbusPlug please refer to the technical manual of COP21-
FBP (CANopen plug).
Summary of Contents for UMC100-FBP
Page 1: ...Technical Description Universal Motor Controller UMC100 FBP ...
Page 157: ......







































































