



























- 129 -
UMC22-FBP
FieldBusPlug / Issue: 02.2008
V 6
Universal Motor Controller UMC22-FBP
Software version 4.0
Chapter 7.8.2~3
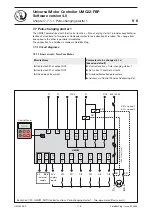
7.8.2.4 Actuator 4:
Open position via torque and limit switches, Closed position via limit switch only
DI0
13
24V
12
DI3
16
DI1
14
Open
Torque
Open,
Closed
Closed
2CDC 342 022 F0206
Limit switches
DI0: Preparation for Open limit off
DI1: Motor off, start only in Open direction
DI3:
- Motor off if prepared for Open off,
start only in Close direction
- Fault if not prepared or if during
closing
Remark:
The limit switch Closed prepares the
stop. Torque Closed stops the motor.
The start is only possible in the opposi-
te direction
The single torque signals in the tele-
gram - Torque open or Torque closed
- are calculated based on the direction
of movement before stop.
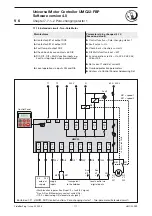
7.8.2.5 Defi nitions and Supervisions particular for the control functions Actuator 1,2,3 and 4
Input signals: Open and Closed inputs are active signals, Torque input is a closed loop signal.
The two Torque signals are connected in series. The discrete Torque signal is created based on the
direction of movement before.
Remark:
If DI2 is not needed as Fault input it can be connected to the connection between the torque con-
tacts to fi nd out which torque signal is active.
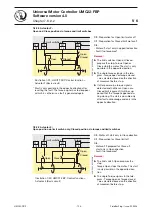
Run-time Open
Close: The
Run-time limit
(
= Star-delta starting time
) must be changed and
should be set according to actuator datas. Setting the
Run-time limit = 1 s
disables the supervision.
Starting from Open or Closed: The limit switch has to open within the start surveying time of 3 s.
Exeeding the time results in the fault signal Open limit switch 1
0 not within 3 s after Close com-
mand. The
Start surveying time
can be enlongated (4.3.4).
Faulty torque signal in intermediate position sets the internal fault signal
The motor is stopped an can be started again
- after fault reset via Fieldbus or other - AND -
- only in the opposite direction (direction before is blocked).
After start the torque signal must disappear within 0.5 s. Otherwise the internal fault signal is set
again.
Fault reset and start in the opposite direction can be repeated as often as desired.
If after power-up a Torque signal (0-signal) is present and neither an Open nor a Close signal is
present it will be supposed that the Torque happened during closing. The motor can be started:
- after fault reset via Fieldbus or other - AND -
- only in the open direction
Illustration 7-31: UMC22-FBP: Control function =
Actuator 4 (Basic circuit)
Summary of Contents for UMC22-FBP
Page 167: ......







































































