






Mini FunFly Flight Controller “Naze32” (
なぜ)
Camera Stabilization and Gimbal Mode
Naze32 can be used as a standalone camera gimbal stabilization unit. By setting multirotor
type to “Standalone Gimbal Stabilization”, servo outputs 1 and 2 can drive camera gimbal
servos. Both analog (50Hz refresh) and digital (200Hz+ refresh) servos are supported.
Servo gain (amount of servo travel for given angle of tilt) is configurable for both pitch
and roll axis.
In addition to standalone stabilization, camera outputs can also be enabled when used as
a standard multirotor controller. In case of regular (PWM) receiver, this limits to Quad mixer.
In case of CPPM receiver, up to Octo can be supported while still allowing for camera control.
Channels AUX3/AUX4 can be assigned to tilt/roll the camera mount in addition to stabilization.
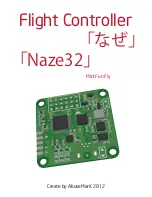
Servo 1
Pitch Axis
Servo 2
Roll Axis
WARNING
If using high-current-draw servos for camera stabilization, consider powering
them from a separate BEC. Only connect Signal and GND wire to the board, and 5V wire
from servos to a separate power source.
GND
5V
Signal
S1
S2
M1
M2
M3
M4
Servo
Mode







































































