




























Specifications and Controls
14
See Chapter 6,
Updating and Configuring AmigOS
for details.
Control Serial Port
If your AmigoBot does not have a radio modem, there is a cable that runs from a DSUB-9
serial connector on the bottom of your robot to another telephone connector-like RJ-
11/12 serial port inset into the cap that covers the Accessory I/O port. Use the top port
with Amigo
LEASH
to connect with offboard client software in Control Mode, such as
Amigo
EYES
or the Saphira demonstration program.
Accessory Connector
Beneath the black rectangular plastic cover near the center of the robot is a 40-position
high-density IDC latching connector mounted on the AmigoBot controller board. It
supports a variety of accessories through its many I/O ports. See Appendix A,
Ports and
Connectors
, for details.
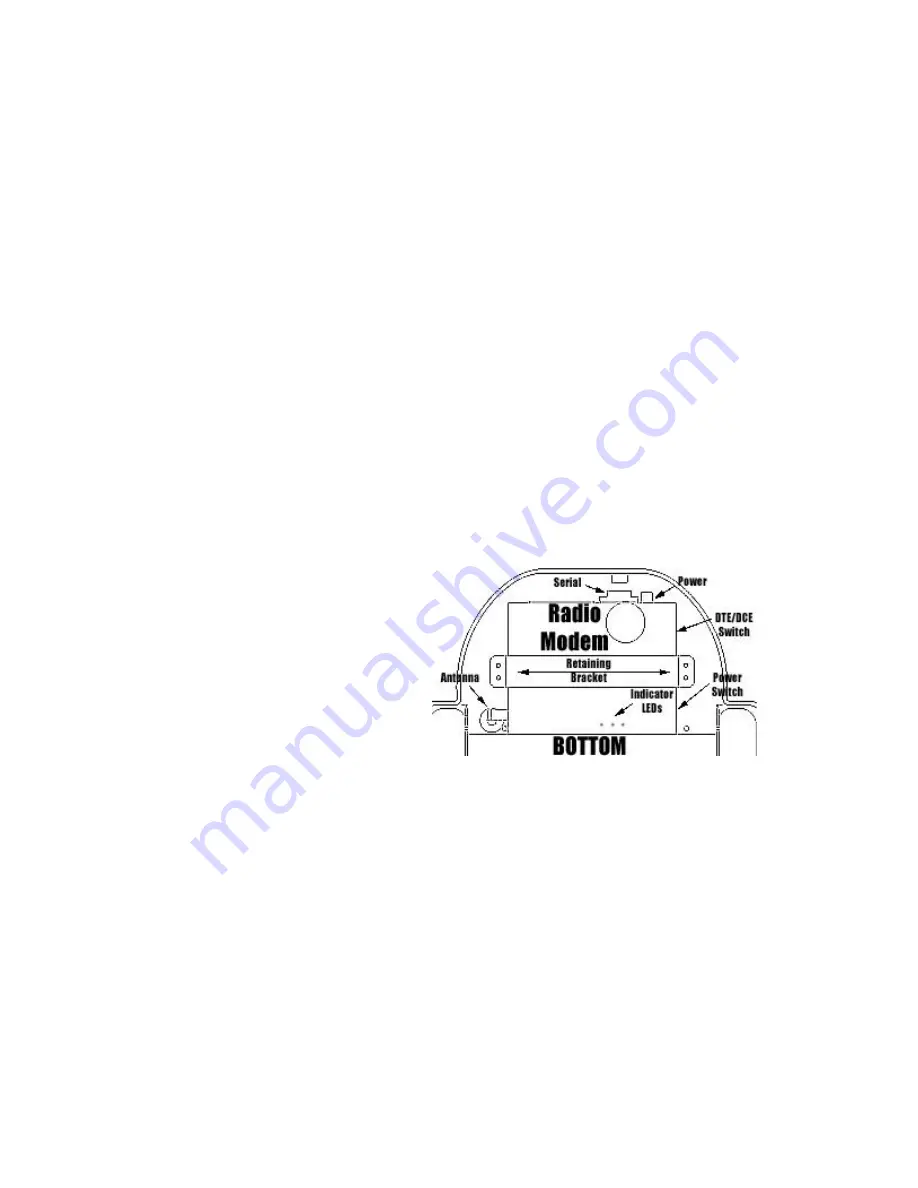
Radio Modems
AmigoBot supports an optional radio modem pair (900 MHz) for wireless operation of the
robot: One modem gets attached to the robot and the other to your basestation
computer. The robot’s modem gets mounted on the underside and gets power (5 VDC)
and signal (Control serial) via a 9-pin DSUB connector and 2.1mm power plug that come
with the robot. The radio’s antenna fits up through the body; it’s top flexible section
unscrews from the main body.
Main power to AmigoBot’s radio modem
is controlled from the robot’s Power
switch. Use the pushbutton switch on the
side of the modem to individually control
its power. A green LED on the modem’s
face labeled PWR indicates power.
When lit, the adjacent red DCD LED
indicates a connection with the Host
modem of the pair. The DTE LED should
remain unlit since the connection is DCE.
If lit, slide the switch at the back side of
the modem near the power connector to
the opposite side so that it is in the DCE position.
The Host radio modem comes with a power module (110 or 220 VAC to 5 VDC) and serial
cable with pin adapters. Connect the power module and serial cable to the modem,
and the other end of the serial cable into an open serial port on your basestation
computer. Operate the power and indicators identically as with the robot’s modem.
The radio modems are preconfigured at the factory for use with AmigoBot. For
configuration details, see the technical documentation that comes with the modems.
Note that the AmigoBot operates only in client-server Control Mode with the radio
modems.
Safety Watchdogs and Configuration
AmigoBot’s onboard server software, AmigOS, contains a communications watchdog
that will halt motion if communications between a client computer and the robot server
are disrupted for a set time interval, normally two seconds (
watchdog
). The robot will







































































