






















Potentiometer port switch
Control the on and off of port1, port2 and port 3 on the development board. If you
turn on an interface, the Raspberry Pi will provide 3.7V power for this interface.
Note: In order to avoid damaging the development board or the Raspberry Pi, do
not connect overloaded components to these three interfaces.
Speed control slider
Controls the speed at which the robot car moves.
If the value is set too small, the robot car will not be moved or difficult to move.
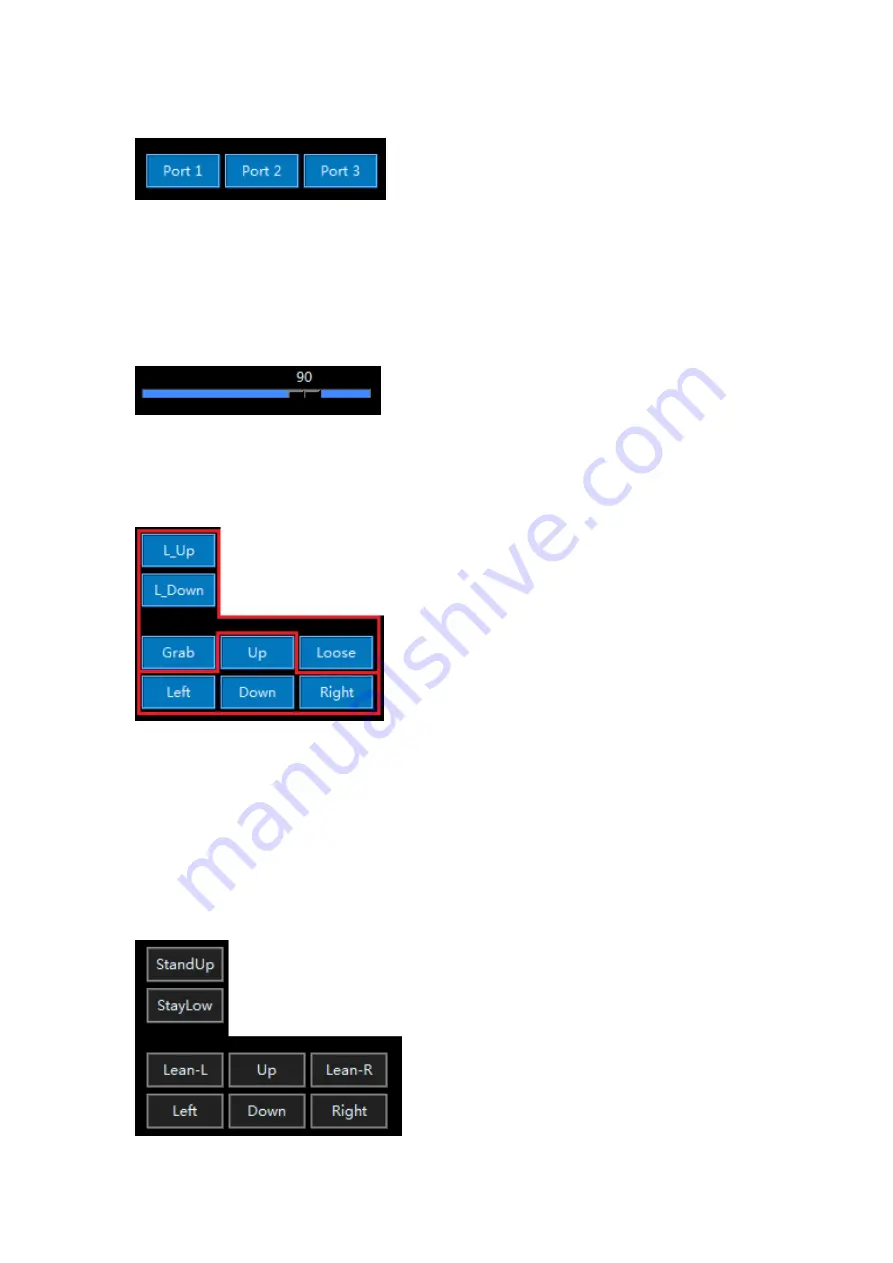
PTZ-Robotic arm control module
Divided into two parts (outlined by a red line). The upper part is dedicated to the
robotic arm mode. L_Up and L_Down control the up and down movement in
mechanical mode, Grab and Loose are grasping and loosing respectively of the
robotic arm. The lower part is universal for PTZ and robotic arm. Left and Right are
the left and right rotation of the PTZ or robotic arm, Up and Down are the up and
down movement of the PTZ or robotic arm.
Spider robot attitude control module







































































