





























137
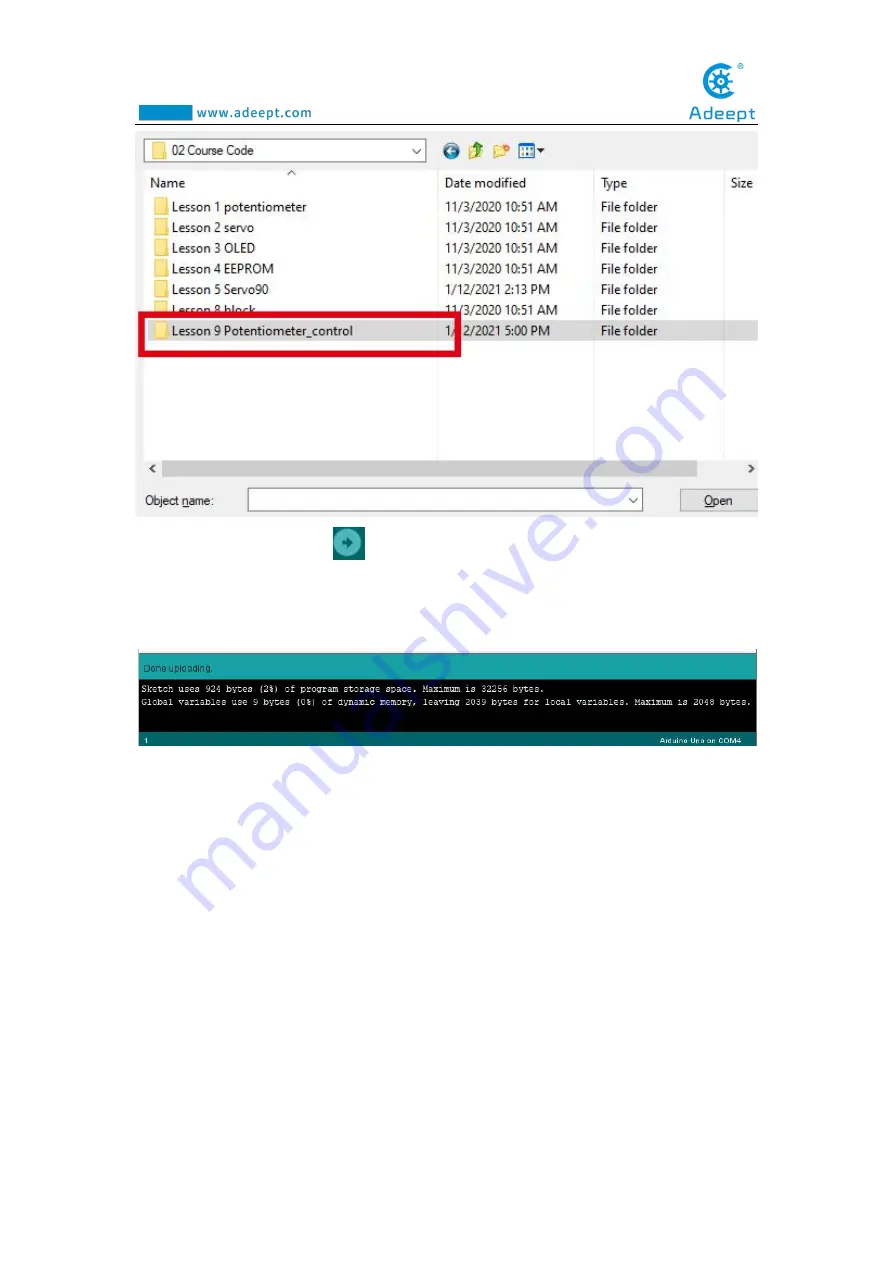
6.After opening, click
to upload the code program to the Adeept Arm Drive
Board. If there is no error warning in the console below, it means that the Upload is
successful.
7.Next, unplug the USB cable connected to the robotic arm. Note: Do not turn on
the power of the arm after downloading the program. Adjust the four potentiometers
on the driver board to the center first, as shown below:
Summary of Contents for Robotic Arm
Page 1: ...1...
Page 33: ...30 9 Running effect is as follow...
Page 74: ...71 SERVO of number 5 4 2 1 3...
Page 86: ...83 Effect diagram after assembling...
Page 95: ...92 40mm 60mm 66 5mm 65mm 13mm 70mm...
Page 99: ...96...
Page 111: ...108...
Page 137: ...134...
Page 154: ...151 7 the library file controlP5 needs to be added...
Page 156: ...153 9 Click Run 10 Running effect is as follow...
Page 164: ...161...
Page 181: ...178...
Page 182: ...179...































































