















Summary of Contents for Cobra s350
Page 1: ...Adept Cobra s350 Robot User s Guide...
Page 2: ......
Page 16: ...Chapter 1 Introduction 16 Adept Cobra s350 User s Guide Rev A...
Page 34: ...Chapter 3 Robot Installation 34 Adept Cobra s350 User s Guide Rev A...
Page 50: ...Chapter 4 MotionBlox 40R 50 Adept Cobra s350 User s Guide Rev A...
Page 62: ...Chapter 5 System Installation 62 Adept Cobra s350 User s Guide Rev A...
Page 66: ...Chapter 6 System Operation 66 Adept Cobra s350 User s Guide Rev A...
Page 84: ...Chapter 8 Maintenance 84 Adept Cobra s350 User s Guide Rev A...
Page 90: ...Chapter 9 Technical Specifications 90 Adept Cobra s350 User s Guide Rev A...
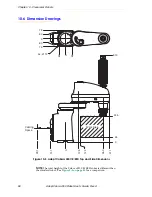
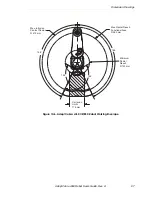
Page 98: ...Chapter 10 Cleanroom Robots 98 Adept Cobra s350 Robot User s Guide Rev A...
Page 102: ...Index 102 Adept Cobra s350 User s Guide Rev A...
Page 103: ......
Page 104: ...3011 Triad Drive Livermore CA 94551 925 245 3400 P N 05624 000 Rev A...




































































