










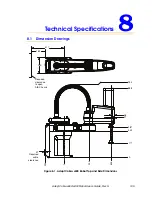


















Chapter 8 - Technical Specifications
108
Adept Cobra s600/s800 Robot User’s Guide, Rev H
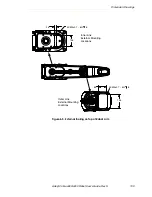
Figure 8-4. Tool Flange Dimensions for Adept Cobra Robots
4X M6 x 1- 6H Thr
u
User Gro
u
nd
See Detail A
Detail A
6.
8
0 mm
(0.26
8
in.)
1.5 mm
(0.059 in.)
4.14 mm
(0.163 in.)
12.0 mm
(0.47 in.)
20.0 mm
(0.79 in.)
3.0 mm
(0.12 in.)
43 mm
(1.69 in.)
30
˚
25
˚
45˚
∅
41.15 mm
∅
63.0 mm (2.4
8
in.)
Dowel Pin Hole
C
B
A
∅
.10 mm (.004 in.)
∅
50.0 mm (1.96
8
5 in.)
BC
∅
6.0 mm
-C-
-A-
-B-
+.03 mm
–.00 mm
(
∅
1.620 in.) (+.001 in.)
(–.000 in.)
M
M
M
R 3.56mm (R 0.140in)
5.0
8
mm (0.20in)
M3 X 0.5-6H Thr
u
(0.2362 in.)
+.01 mm
– 0 mm
(+.0005 in.)
(– 0 in.)
Summary of Contents for Cobra s600
Page 1: ...Adept Cobra s600 s800 Robot User s Guide...
Page 2: ......
Page 14: ......
Page 20: ......
Page 52: ......
Page 68: ......
Page 80: ......
Page 116: ......
Page 132: ......
Page 146: ......
Page 151: ......
Page 152: ...5960 Inglewood Drive Pleasanton CA 94588 925 245 3400 P N 03017 000 Rev H...







































































