





















Chapter 8 - Maintenance
116
Adept Cobra s800 Inverted Robot User’s Guide, Rev C
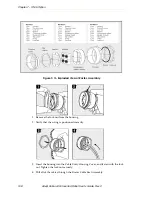
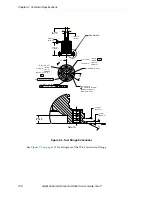
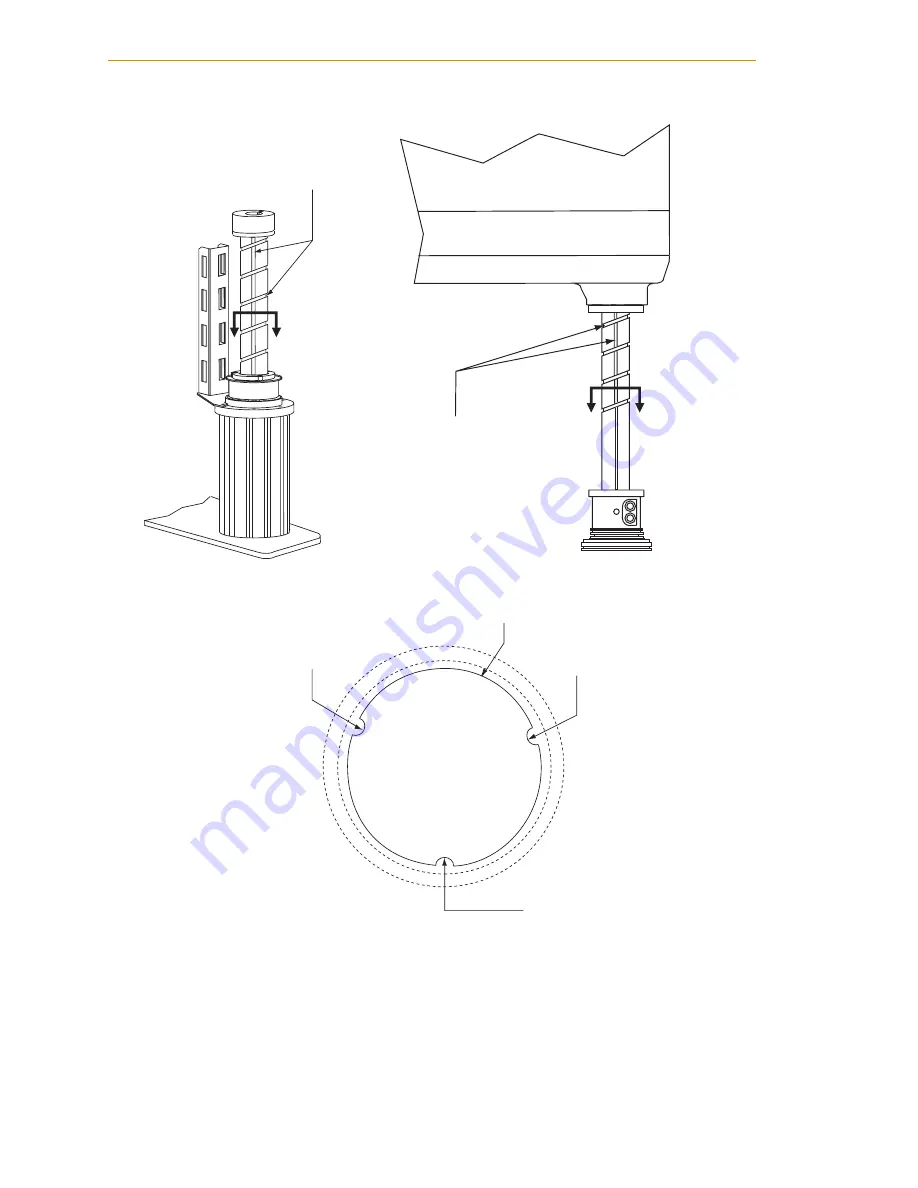
Figure 8-1. Lubrication of Joint 3 Quill
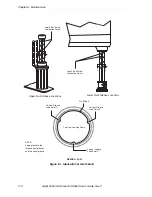
Joint 3 Ball Screw
Lubrication Points
NOTE:
Apply grease to the
three vertical grooves
and the spiral groove
A
A
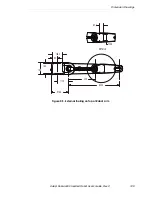
Section A-A
Top View Looking Down
Quill Shaft
Vertical Groove
Lube Point A
Vertical Groove
Lube Point B
Vertical Groove
Lube Point C
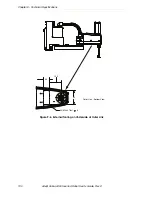
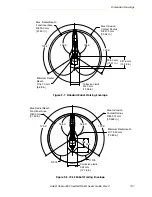
Upper Quill Grease Locations
Lower Quill Grease Locations
Joint 3 Ball Screw
Lubrication Points
A
A







































































