






















Chapter 8 - Maintenance
124
Adept Cobra s800 Inverted Robot User’s Guide, Rev C
NOTE:
Before you disconnect the Joint 2 motor cable from the AIB chassis,
you need to perform the procedure below. If you do not, the Joint 2 motor
encoder information will be lost and you will need to re-initialize the
robot after you reconnect the Joint 2 motor cable to the AIB chassis.
1. Obtain the replacement battery, p/n 02704-000.
2. Turn off all power to the robot.
3. Remove 10 screws on the bottom of the inner link cover and remove the inner link
cover.
4. Locate the battery cable in the wire bundle in the inner link.
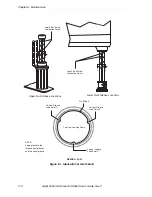
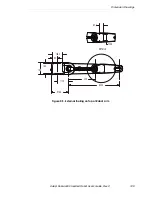
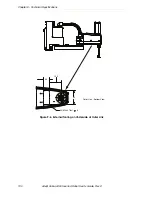
Figure 8-10. Location of Encoder Battery Cable in Inner Link
5. Connect the battery to the connectors on the battery cable. Make sure to verify
that the positive and negative connections are correct.
NOTE:
After the inner link assembly has been reassembled with the robot
base assembly and the wire harness has been securely connected to the
AIB chassis, you can remove the encoder battery in the inner link.
Encoder Battery
Encoder Battery
Cable







































































