























Chapter 10 - Dual Robot Systems
138
Adept Cobra s800 Inverted Robot User’s Guide, Rev C
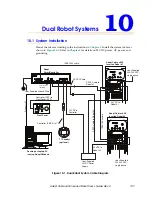
A Dual Adept Cobra robot system consists of the following components:
• Two standard Adept Cobra s800 Inverted robots
• Adept SmartController CX
• Multiple Adept robots License
• V
+
Extensions License
10.2 System Configuration
If you purchased both robots at the same time as part of a Dual Robot system, then the
two robots will be configured at the factory for the correct software setup.
If you are setting up a system that was not configured at the factory, then you will need to
do this process. Go to the Procedures section of the Adept Document Library, and open
the
Dual Cobra S-Series Robot Configuration Procedure
The main steps in the configuration procedure are:
1. Install the robots and controller as per the diagram in
NOTE:
The procedure below is only required if your system was not
configured for dual robots at the factory.
2. Use the CONFIG_C utility to determine if the Cobra s800 Inverted robot device
modules are already installed in the V+ system. If not, use the CONFIG_C utility
to load the “ASN” device-module file, and to select the device modules for the
two robots.
3. If changes to the configuration were made, save the data and reboot the system.
4. Use the DC_SETUP utility to configure each robot as a unique node on the
SmartServo network.
NOTE:
If the robots were shipped from the factory configured as single
robot systems, both robots will be configured as Robot 1. At this stage,
you must press the space bar to cycle through each robot to
“unconfigure” them as Robot 1 before you continue. If you do not visit
each servo node, there will be no servo nodes presented to you later in the
procedure when you configure Robot 2.
5. Use the DC_SETUP utility to assign the correct digital “logical” IO blocks to each
robot. Robot 1 uses block 1 and block 3; robot 2 uses block 2 and block 4. See
and
.
6. If you are adding digital IO to the system, go to the next section for details on that
process.






































































