






















Connecting Digital I/O to a Dual Robot System
Adept Cobra s800 Inverted Robot User’s Guide, Rev C
139
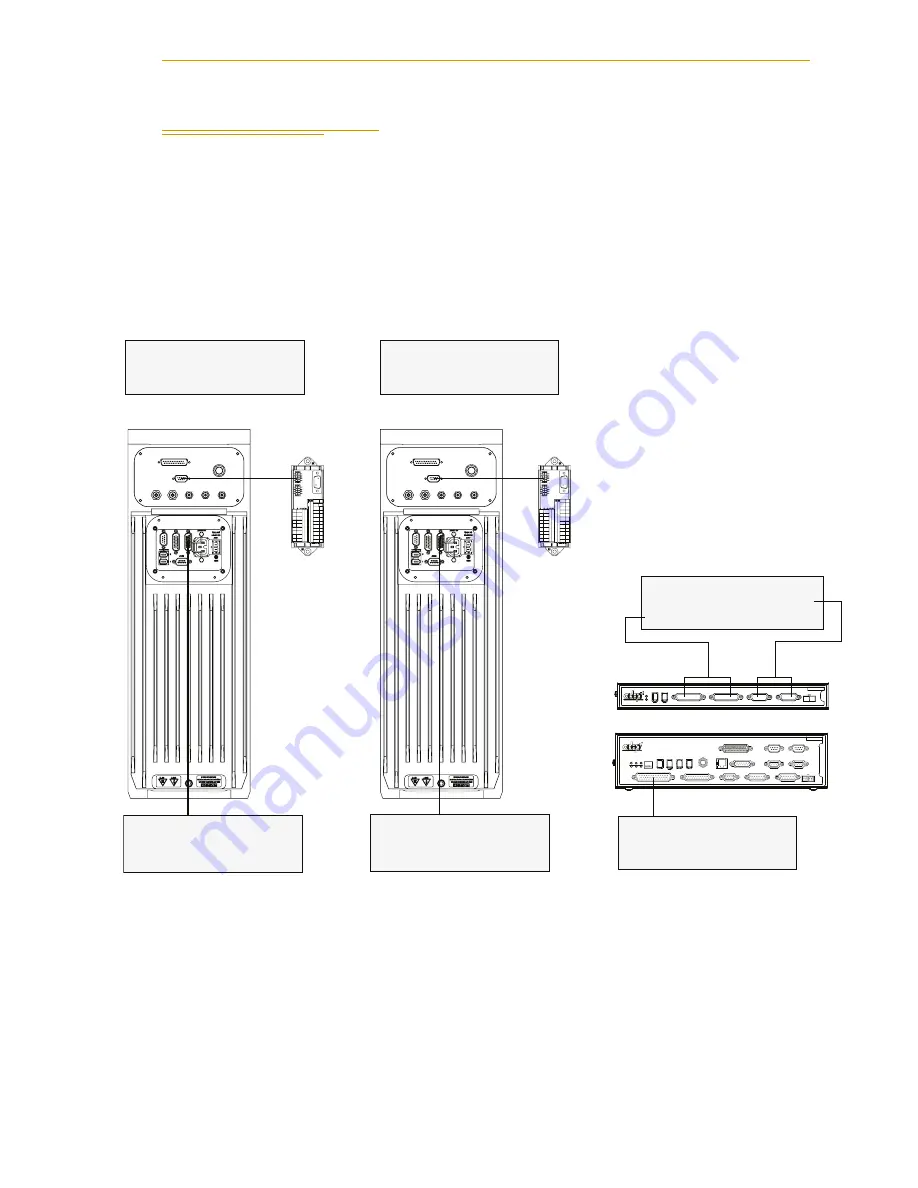
10.3 Connecting Digital I/O to a Dual Robot System
You can connect digital I/O to a dual robot system as shown in
. The default
signal configuration, or mapping, is shown in
. This configuration
is usually sufficient for most installations. If you need to add more I/O, or change the
mapping, see
NOTE:
With the release of V+ 16.1 F6 in January 2005, the default signal
configuration for digital I/O was changed to the values shown in
Figure 10-2. Digital I/O Connections to a Dual Robot System
SF
IEEE-1394
X2
SC-DIO
LINK
*S/N 3563-XXXXX*
X1
24V
0.5A
R
OK
X4
- + - +
1.1
1.2
XDC1 XDC2
X3
R
ON
SmartServo
IEEE-1394
1 2 3 4
SF
ES
HD
SW1
1.1
1.2
2.1
2.2
OK
1
2
3
XDIO
LAN
HPE
OFF
XSYS
CAMERA
Eth 10/100
XUSR
Device Net
XFP
RS-232/TERM
RS-232-1
XMCP
BELT ENCODER
Smar
tController CX
-+
-+
RS-422/485
XDC1 XDC2
24V
5A
*S/N 3562-XXXXX*
RS-232-2
Optional
sDIO #1
SmartController
Robot #2
Optional
IO Blox Device
XIO Connector on Robot #2
12 Input signals: 1145 to 1156
8 Output signals: 0137 to 0144
XDIO Connector
12 Input signals: 1001 to 1012
8 Output signals: 0001 to 0008
IO Blox #1 on Robot #2
8 Input signals: 1161 to 1168
8 Output signals: 0145 to 0152
sDIO #1
32 Input signals: 1033 to 1064
32 Output signals: 0033 to 0064
Robot #1
Optional
IO Blox Device
XIO Connector on Robot #1
12 Input signals: 1097 to 1108
8 Output signals: 0097 to 0104
IO Blox #1 on Robot #1
8 Input signals: 1113 to 1120
8 Output signals: 0105 to 0112
































































