























Chapter 10 - Dual Robot Systems
142
Adept Cobra s800 Inverted Robot User’s Guide, Rev C
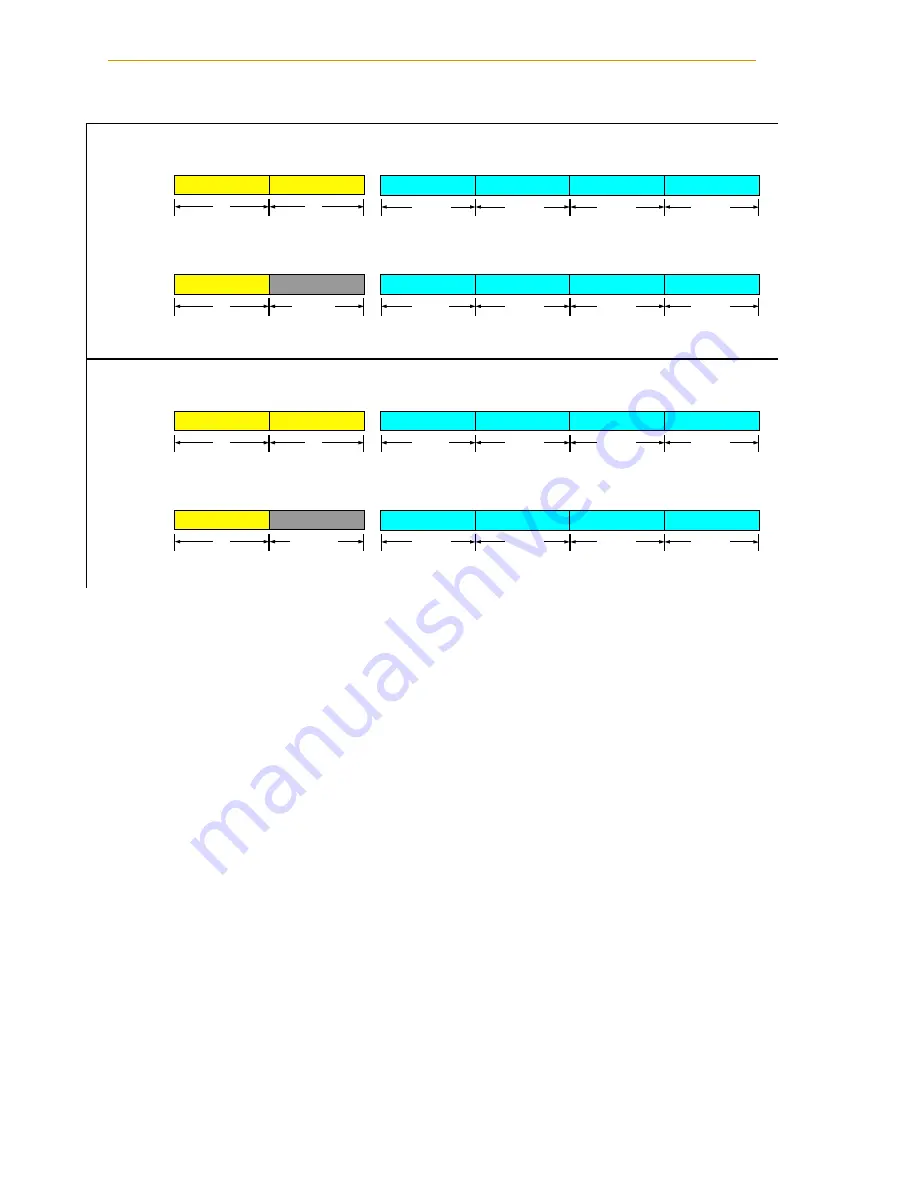
Figure 10-3. Input/Output Block Configuration in Dual Robot Systems
ROBOT 1
XIO
Output Block 1
Byte 1
Byte 2
(97-104)
Internal IO
(3001-3004)
XIO
Input Block 1
Byte 1
Byte 2
(1097-1104)
XIO
(1105-1108)
4 spare
IO Blox 1
Output Block 3
Byte 1
Byte 2
(0105-112)
IO Blox 2
(0113-120)
IO Blox 3
IO Blox 4
(0121-128)
(0129-136)
Byte 3
Byte 4
IO Blox 1
Byte 1
Byte 2
(1113-1120)
IO Blox 2
(1121-1128)
IO Blox 3
IO Blox 4
(1129-1136)
(1137-1144)
Byte 3
Byte 4
Input Block 3
ROBOT 2
XIO
Input Block 2
Byte 1
Byte 2
(0137-0144)
Internal IO
(3001-3004)
XIO
Output Block 2
Byte 1
Byte 2
(1145-1152)
XIO
(1153-1156)
4 spare
IO Blox 1
Input Block 4
Byte 1
Byte 2
(0145-0152)
IO Blox 2
(0153-0160)
IO Blox 3
IO Blox 4
(0161-0168)
(0169-0176)
Byte 3
Byte 4
IO Blox 1
Byte 1
Byte 2
(1161-1168)
IO Blox 2
(1169-1176)
IO Blox 3
IO Blox 4
(1177-1184)
(1185-1192)
Byte 3
Byte 4
Output Block 4







































































