

























Digital I/O Block Configuration
Adept Cobra s800 Inverted Robot User’s Guide, Rev C
141
10.4 Digital I/O Block Configuration
In most system installations you can use the default I/O configurations shown in the
previous section, and you will not have to modify the I/O configuration files. If you need
to modify the I/O configuration, then you must use the CONFIG_C program, as
described in
.
The information in this section can help during the configuration, or mapping process.
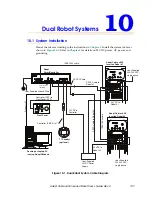
The diagram in
shows the output and input blocks for robots 1
and 2 in a dual robot system.
XIO Inputs/Outputs
The XIO connector on the Cobra s-series robot provides 8 outputs and 12 inputs. See also
for details on the XIO connector signal designations and electrical
specifications.
XIO Outputs
XIO outputs are mapped starting at 0097 for robot 1 and 0137 for robot 2. Because there
are only 8 outputs available on the XIO, they only take up the first byte on the first output
block.
XIO Inputs
XIO inputs are mapped starting at 1097 for robot 1 and 1145 for robot 2. The first 2 bytes
are allocated as follows:
1st Cobra (1097 - 1108) on Block 1, 2nd Cobra (1145 - 1156) on Block 2.
Internal Robot Outputs
The internal outputs are the signals 3001-3004 that can be used to control optional
solenoids (hand valves) internal to the robot. These internal outputs take up the 2nd byte
on the first output block allocated to each robot.
Signals 3001-3004 are allocated to each robot (robot 1 and robot 2). This means you need to
SELECT the robot from your application before attempting to control its outputs (e.g.
SELECT ROBOT = 1) This mapping is done using the CONFIG_C - Robot option.
IO Blox Inputs/Outputs
Up to four IO Blox devices can be daisy-chained together to give you 32 inputs and 32
outputs. IO Blox occupy the first 4 bytes of the second block allocated to the robot. See
. Also see the
for more information.
sDIO Inputs/Outputs
Up to four sDIO modules can be added to a system. The first sDIO occupies the first 4
bytes of block 16. See
for more information.






































































