





























Using Digital I/O on Robot XIO Connector
Adept Cobra s800 Inverted Robot User’s Guide, Rev C
61
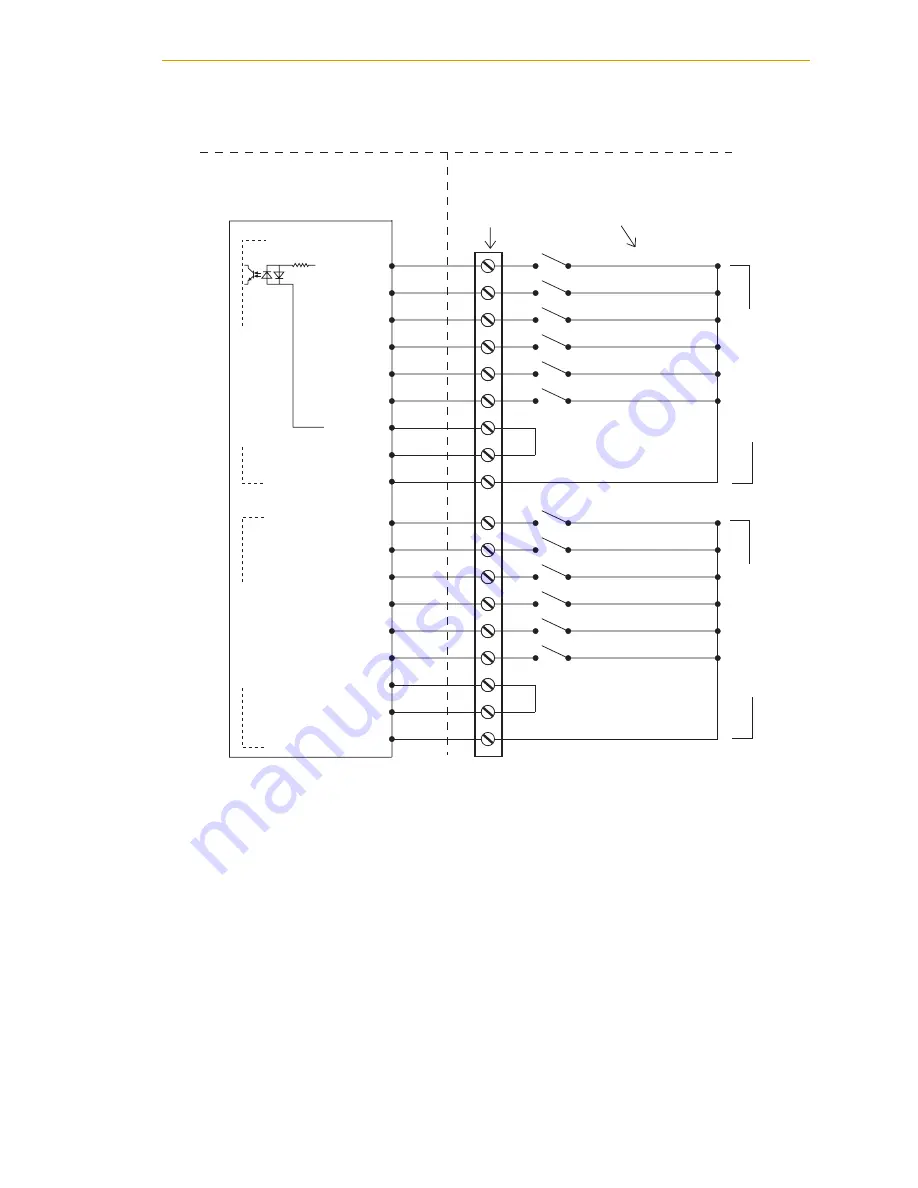
Typical Input Wiring Example
Figure 5-4. Typical User Wiring for XIO Input Signals
NOTE:
The OFF state current range exceeds the leakage current of XIO
outputs. This guarantees that the inputs will not be turned on by the
leakage current from the outputs. This is useful in situations where the
outputs are looped-back to the inputs for monitoring purposes.
Adept-
Su
pplied E
qu
ipment
U
s
er-
Su
pplied E
qu
ipment
S
ign
a
l 1097
P
a
rt Pre
s
ent
S
en
s
or
4
S
ign
a
l 109
8
Feeder Empty
S
en
s
or
5
S
ign
a
l 1099
P
a
rt J
a
mmed
S
en
s
or
6
S
ign
a
l 1100
S
e
a
l
a
nt Re
a
dy
S
en
s
or
7
S
ign
a
l 1101
8
S
ign
a
l 1102
+24 V
GND
9
B
a
nk 1
Common
B
a
nk 2
Common
3
2
1
S
ign
a
l 110
3
1
3
S
ign
a
l 1104
14
S
ign
a
l 1105
15
S
ign
a
l 1106
16
S
ign
a
l 1107
17
S
ign
a
l 110
8
1
8
12
GND
10
+24 V
11
Wiring
Termin
a
l
Block
Typic
a
l U
s
er
Inp
u
t
S
ign
a
l
s
Note:
a
ll Inp
u
t
s
ign
a
l
s
c
a
n
b
e
us
ed for either
s
inking or
s
o
u
rcing
config
u
r
a
tion
s
.
B
a
nk 1 config
u
red for
S
inking (NPN) Inp
u
t
s
B
a
nk 2 config
u
red for
S
o
u
rcing (PNP) Inp
u
t
s
Inp
u
t B
a
nk 2
Inp
u
t B
a
nk 1
XIO Connector – 26-Pin Fem
a
le D-
Sub
(e
qu
iv
a
lent circ
u
it)







































































