





























Mounting Locations for External Equipment
Adept Cobra s800 Inverted Robot User’s Guide, Rev C
77
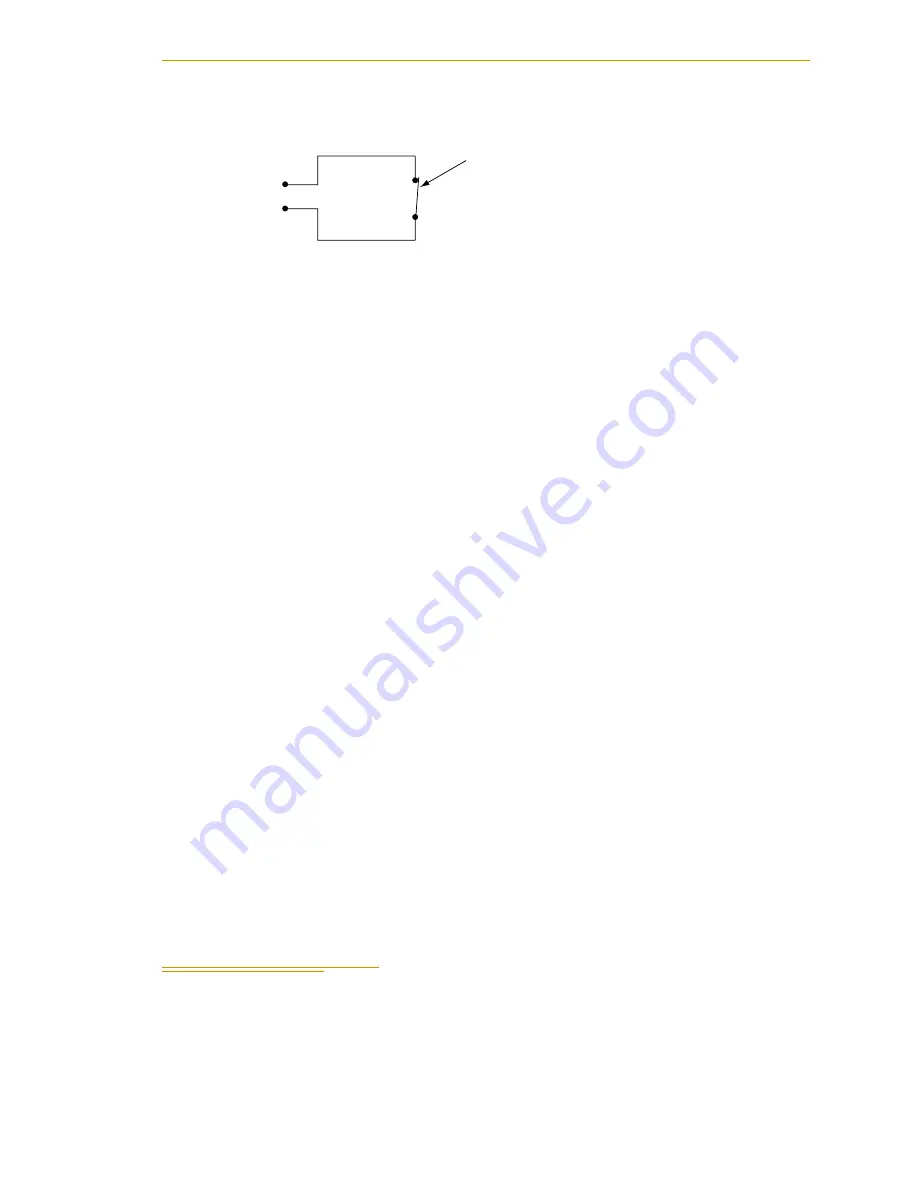
Figure 6-8. Internal E-Stop Connector Circuit
NOTE:
This circuit will trigger an emergency stop of the local robot only.
It does not link to the E-Stop chain of the host SmartController.
Procedure to Enable Breakaway E-Stop Function
To enable the Breakaway E-stop function, you have to use the SPEC utility to change the
default configuration:
1. At the V+ prompt, type: load \util\spec.
2. In the opening window, select “Edit robot specifications”.
3. In the next window, select “Edit robot initialization specs”.
4. In the next window, select “Edit servo option word”.
5. In the next window, type Y to the prompt, “Do you wish to modify servo
options?”.
6. In the next window, type Y to the prompt, “Bit 1 clear. Change it (Y/N)?”.
7. In the next window, you should see this line:
Edit Servo Option Word 1
This confirms that you have enabled the Breakaway E-Stop function.
8. Select “Exit to robot menu”.
9. Select “Exit to main menu” on the next displayed menu.
10. Select “Save all specifications to system disk”.
11. Finally, answer “Yes” to write the data to the boot disk.
NOTE:
When the Break-away E-stop function has been enabled, you must
connect a normally-closed circuit to pins 1 and 2 of the ESTOP connector,
as described above. If this is not done, the system will be in an E-stop
condition and you will not be able to enable power.
6.5
Mounting Locations for External Equipment
Two locations are provided for mounting the user’s external equipment on the robot arm.
The first location is on the top side of the outer link, and the second is on the bottom side
of the outer link. Each location has a set of four tapped holes. See
for the dimensions.
Pin 1
Pin 2
U
s
er-
su
pplied norm
a
lly-clo
s
ed cont
a
ct.
C
a
n
b
e connected to
a
b
re
a
k-
a
w
a
y
s
en
s
or
to c
aus
e
a
n E-
S
top condition when circ
u
it
i
s
open.
Note: Thi
s
f
u
nction i
s
di
sab
led
b
y def
au
lt - it m
us
t
b
e en
ab
led in
s
oftw
a
re.
Typic
a
l E
S
TOP
Connector Circ
u
it







































































