





























Operation Theory
45
tv_change(), sv_change() or stopped by the functions tv_stop(),
sv_stop(), emg_stop().
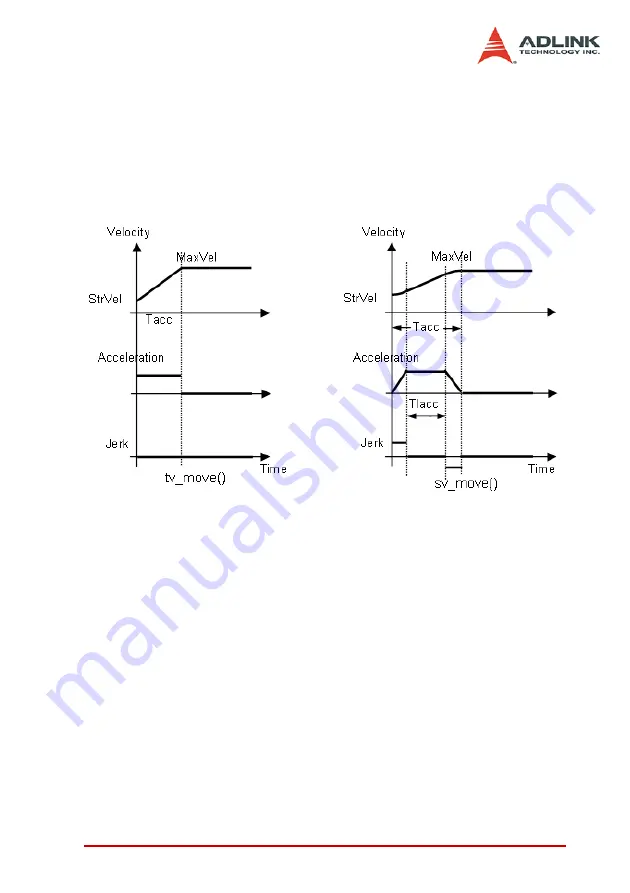
Two kinds of acceleration method are available. By using
tv_move(), the acceleration is constant as shown in the in left dia-
gram below. By using sv_move(), the derivative of acceleration,
the ‘jerk’, is a constant as Illustrated in the right diagram below.
Figure 4-2: Constant Jerk Graph
4.3.2
Single axis P to P motion
In this section, the following functions are discussed.
start_tr_move(Axis, Dist, StrVel, MaxVel, FinVel,
Tacc, Tdec)
start_sr_move(Axis, Dist, StrVel, MaxVel, FinVel,
Tacc, Tdec, Tlacc, Tldec)
start_ta_move(Axis, Pos, StrVel, MaxVel, FinVel,
Tacc, Tdec)
start_sa_move(Axis, Pos, StrVel, MaxVel, FinVel,
Tacc, Tdec, Tlacc, Tldec)
Single axis P-to-P motion functions will allow the axis to move a
specified distance or move to a specified position. The first four
functions are pretty straightforward. ‘t’, ’r’, ’s’ and ’a’ characterizes
Summary of Contents for PCI-8366+
Page 4: ......
Page 14: ...x List of Figures ...
Page 17: ...Introduction 3 Figure 1 3 Flowchart for Building an Application ...
Page 26: ...12 Installation 2 2 PCI 8372 8366 Outline Drawing Figure 2 1 PCI 8372 8366 Mechanical Drawing ...
Page 31: ...Installation 17 2 Press HPI boot ...
Page 32: ...18 Installation 3 Press Flash DL button and select a kernel4 hex ...
Page 34: ...20 Installation Figure 2 3 SSCNET Communication Test Utility ...
Page 49: ...Signal Connections 35 Figure 3 9 Skin Type ...
Page 144: ...130 Operation Theory ...
Page 149: ...Motion Creator 135 Figure 5 6 Software Version Information ...
Page 160: ...146 Motion Creator Figure 5 13 Channel Selection Frame Figure 5 14 Motion Frame ...







































































