
















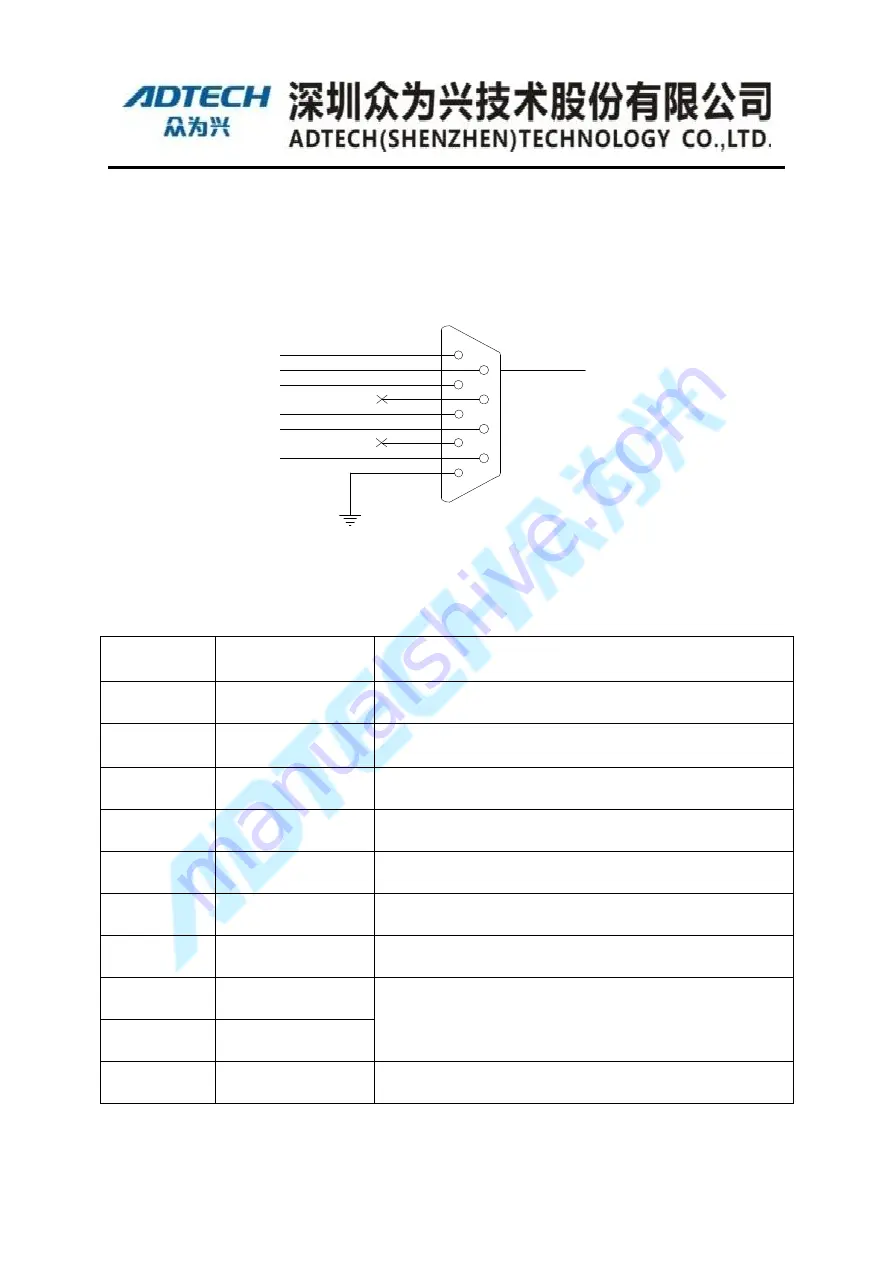
6.2 COM2 Port Connection
In order to facilitate the maintenance of robot drive system, a COM2 communication
port is provided by QC400. COM2 port is provided with a standard DB9 head terminal,
which is no need to connect a voltage switch board. Each pin of COM2 is defined as follows:
RX1 1
TX1 6
TX0 2
RX0 3
7
485_A 8
485_B 9
4
5
10
PE
Figure 6-3 Schematic diagram of COM2
Each pin functions and
instructions
as shown in the table
:
Table 6-2 COM2 terminal signal description
Pin number
Signal name
Explain
1
RX1
First signal receiving end
2
TX0
The 0 signal sending end
3
RX0
The 0 signal receiving end
4
Suspended
Suspended
5
GND
Ground
6
TX1
First signal sending end
7
Suspended
Suspended
8
485_A
Communication interface when using 485
9
485_B
10
PE
Shielding wire







































































