




























ADT-
TH08HA-Spring Machine System
18
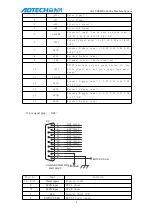
Figure 3.2
At this point you can press up and down arrow keys to select the disk around. C yaffs disk, D
disk FAT disk, E disk is connected with the U disk.
Press "ENT" to enter the corresponding disk, as shown in Figure 3.3 below:
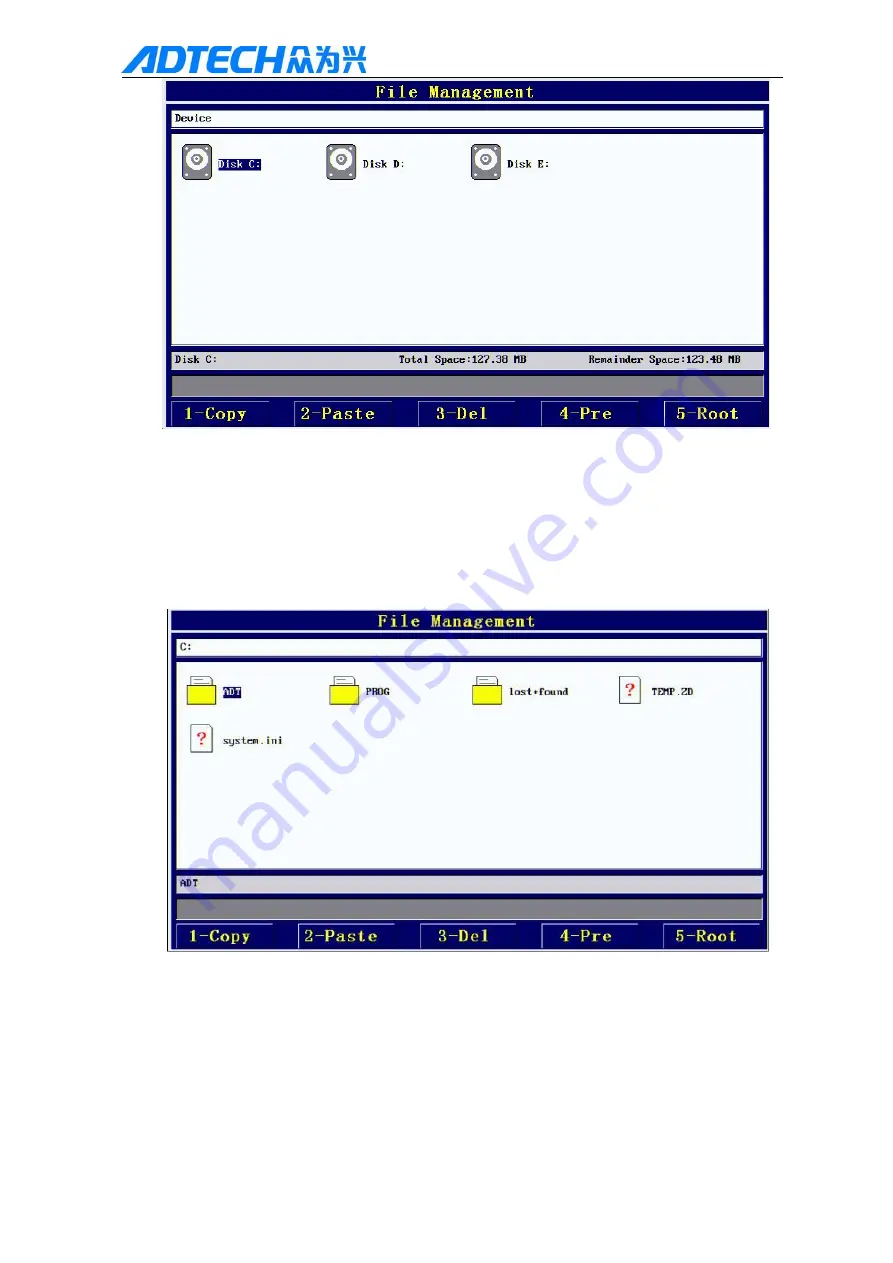
Figure 3.3
According to the "1" can be a file copy, "2" can be copied before the file paste to the current
directory; according to "3" delete the current cursor where the file or folder, press the "Y/N" in the
system, press "" to cancel the operation; according to "4" can be returned to the previous level
directory; "5" can be returned to the root directory; "" can exit the file management system, back to
the main processing interface.
Note: when using a mobile U disk operation, the mobile U disk must be formatted as FAT







































































