





























M
OTION
C
ONTROL
SMD23E2 and SMD24E2 User’s Manual
ADVANCED MICRO CONTROLS INC.
26
Definitions (continued)
Target Position
The Target Position is the position that you want the move to end at. There are two ways to define the Target
Position, with relative coordinates or absolute coordinates.
Relative Coordinates
Relative coordinates define the Target Position as an offset from the present position of the motor. Most
SMD23E2 and SMD24E2 moves use relative coordinates.
The range of values for the Target Position when it is treated as an offset is ±8,388,607 counts. Positive
offsets will result in clockwise moves, while negative offsets result in counter-clockwise moves.
The Motor Position value reported back to the host exceeds ±8,388,607 counts. The only way to move
beyond ±8,388,607 counts is with multiple relative moves or jog commands.
Absolute Coordinates
Absolute coordinates treat the Target Position as an actual position on the machine. Note that you must set the
Home Position on the machine before you can run an Absolute Move. (See
on the previous
page.)
The range of values for the Target Position when it is treated as an actual position on the machine is
±8,388,607 counts. The move will be clockwise if the Target Position is greater than the Current Posi-
tion and negative if the Target Position is less than the Current Position.
The Motor Position value reported back to the host exceeds ±8,388,607 counts. However, you cannot
move beyond ±8,388,607 counts with an Absolute Move. The only way to move beyond ±8,388,607
counts is with multiple relative moves or jog commands.
Definition of Acceleration Types
With the exception of Registration Moves, all move commands, including homing commands, allow you to
define the acceleration type used during the move. The SMD23E2 and SMD24E2 supports three types of
accelerations and decelerations. The type of acceleration used is controlled by the
Acceleration Jerk
parame-
ter.
Detailed move profile calculations, including the effect of the
Acceleration Jerk
parameter, can be found in
the reference section,
, starting on page 43.
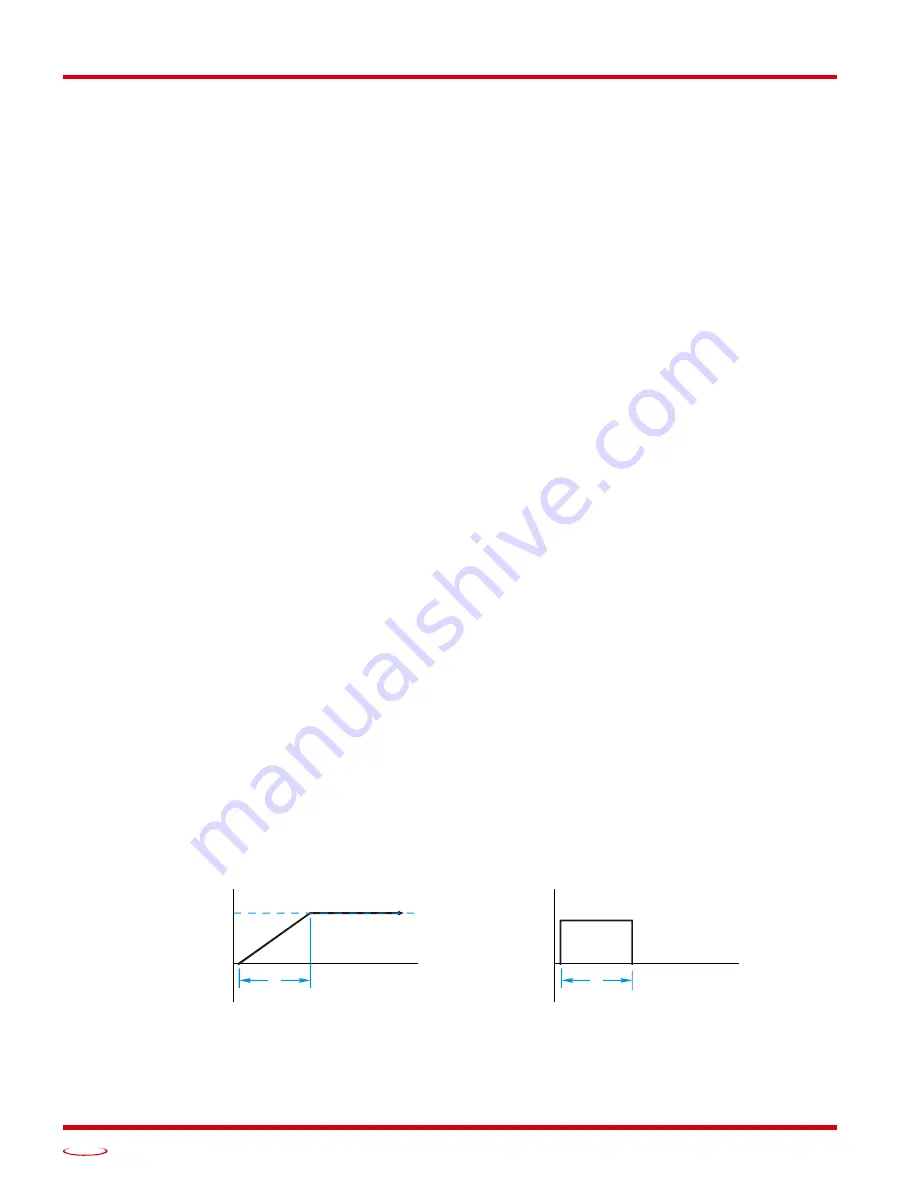
Linear Acceleration
When the Acceleration Jerk parameter equals zero, the axis accelerates (or decelerates) at a constant rate until
the programmed speed is reached. This offers the fastest acceleration, but consideration must be given to
insure the smoothest transition from rest to the acceleration phase of the move. The smoothest transition
occurs when the configured Starting Speed is equal to the square root of the programmed Linear Accelera-
tion. Note that other values will work correctly, but you may notice a quick change in velocity at the begin-
ning of the acceleration phase.
Figure R2.1 Linear Acceleration
SPEE
D
ACC
EL
ERA
T
IO
N
TIME
TIME
t
t
Programmed
Speed







































































