





























M
OTION
C
ONTROL
SMD23E2 and SMD24E2 User’s Manual
ADVANCED MICRO CONTROLS INC.
32
Basic Move Types (continued)
CW/CCW Jog Move
Jog Moves move in the programmed direction as long as the command is active. Two commands are avail-
able. The CW Jog Move will increase the motor position count while the CCW Jog Move will decrease the
motor position count. These commands are often used to give the operator manual control over the axis.
Jog Moves are also used when you are interested in controlling the speed of the shaft instead of its position.
One such application is driving a conveyor belt. To accommodate these applications, the running speed,
acceleration, and deceleration of the Jog Move can be changed
while the move is in progress
.
The CW Limit and CCW Limit inputs behave differently for CW/CCW Jog Moves and CW/CCW Registra-
tion Moves than all other move types. Like all moves, activating a limit will bring the move to an Immediate
Stop. Unlike other moves, a Jog or Registration move can be started when an end limit switch is active pro-
vided that the commanded direction is opposite that of the activated switch. For example, a CW Jog Move can
be issued while the CCW limit switch is active. This allows you to move off of an activated end limit switch.
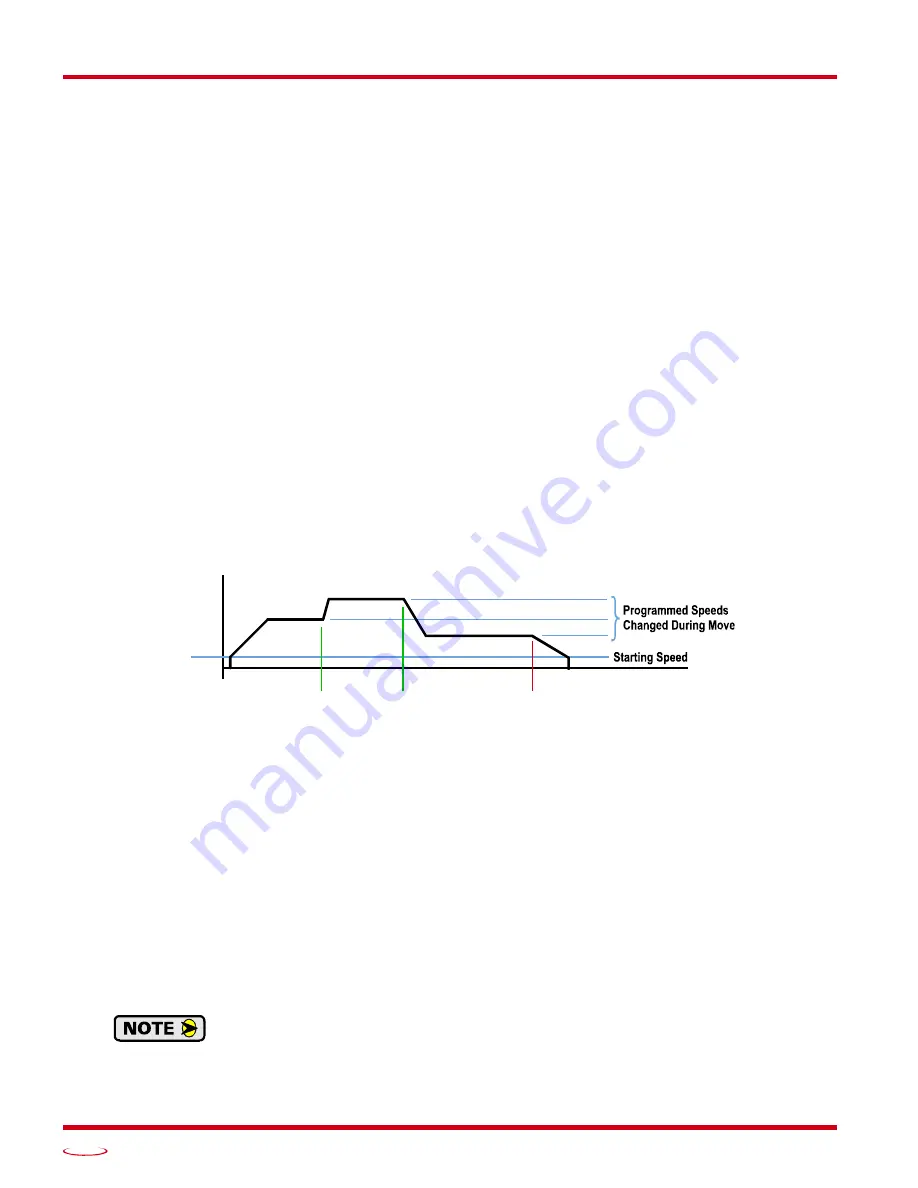
As shown below, a Jog Moves begins at the programmed Starting Speed, accelerates at the programmed rate
to the Programmed Speed and continues until a stop condition occurs. If it is a
Controlled Stop Condition
, the
SMD23E2 or SMD24E2 will decelerate the motor to the starting speed and stop without losing position. If it
is an
Immediate Stop Condition
, the motion stops immediately and the position becomes invalid.
It is possible to change the speed of a Jog Move without stopping the motion. The Programmed Speed, Accel-
eration, and Deceleration parameters can be changed during a Jog Move. When the Programmed Speed is
changed, the motor will accelerate or decelerate to the new Programmed Speed using the new accelerate/
decelerate parameter values. If you write a Programmed Speed to the unit that is less than the starting speed,
the Jog Move will continue at the previously programmed speed.
Figure R2.8 Jog Move
Controlled Stop Conditions
The Jog Move Command bit is reset to “0”.
An inactive-to-active transition on an input configured as a
Stop Jog or Registration Move
Input.
You toggle the Hold_Move control bit in the Network Output Data. The use of the Hold_Move and
Resume_Move bits is explained in the
Immediate Stop Conditions
The Immediate_Stop bit makes a 0
1 transition in the Network Input Data.
A inactive-to-active transition on an input configured as an E-Stop Input.
A CW or CWW Limit Switch is reached. If the limit that is reached is the same as the direction of
travel, for example, hitting the CW limit while running a CW move, a
Reset Errors
command must be
issued before moves are allowed in that direction again. If the limit that is reached is opposite the direc-
tion of travel, a
Reset Errors
command does not have to be issued.
Note that it is possible to
start
a move while a CW or CCW Limit Switch is active as long as
the direction of travel is
opposite
that of the activated Limit Switch. For example, it is possible
to start a CW Jog Move while the CCW Limit Switch is active.
SP
E
E
D
POSITION
Change in
Parameters
Change in
Parameters
Controlled
Stop Condition







































































