





























C
ONFIGURATION
M
ODE
D
ATA
F
ORMAT
SMD23E2 and SMD24E2 User’s Manual
ADVANCED MICRO CONTROLS INC.
62
Output Data Format (continued)
Configuration Word 0 Format (continued)
Bit 10: Use_Encoder –
“0” when the built-in encoder is not used or not available. “1” to enable the built-in
absolute or quadrature encoder. You must also program the Encoder_Resolution parameter in config-
uration word 6.
Bits 9-6: Reserved –
Must equal “0”.
Bits 5-3: Input 2 Function –
See the table below.
Bits 2-0: Input 1 Function –
See the table below.
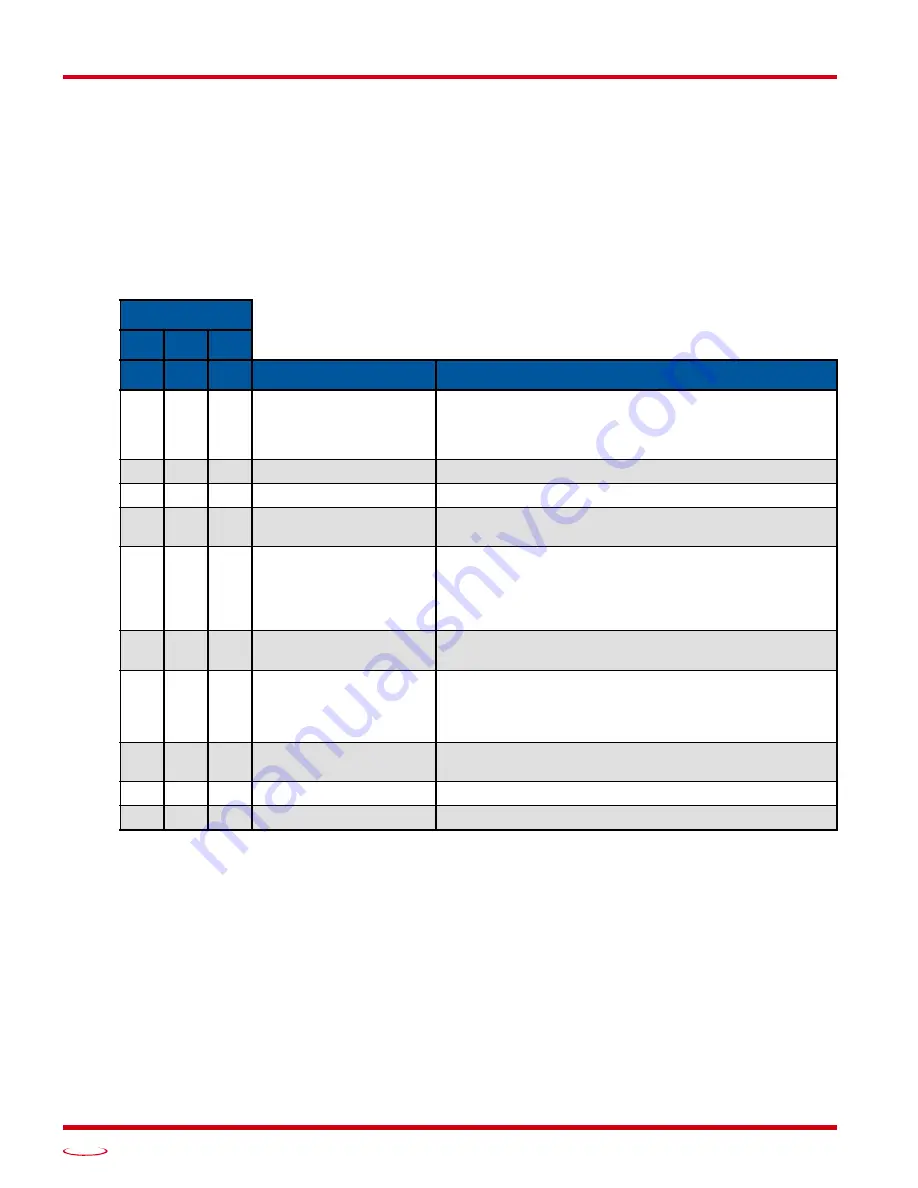
Table R5.4 Configuration Data: Input Function Selections
Bits
5
4
3
2
1
0
Function
Available On
0
0
0
General Purpose Input
The input is not used in any of the functions of the
SMD23E2 or SMD24E2, but it’s status is reported in the
Network Data. This allows the input to be used as a dis-
crete DC input to the host controller.
0
0
1
CW Limit
Input defines the mechanical end point for CW motion.
0
1
0
CCW Limit
Input defines the mechanical end point for CCW motion.
0
1
1
Start Indexed Move
Starts the move that is currently located in the output reg-
isters.
0
1
1
Start Indexed Move /
Capture Encoder Value
When the encoder is enabled on an SMD23E2 or
SMD24E2, the encoder position value is captured when-
ever this input transitions. An inactive-to-active state tran-
sition will also trigger an Indexed Move if one is pending
in the SMD23E2 or SMD24E2.
1
0
0
Stop Jog or
Registration Move
Brings a Jog or Registration Move to a controlled stop.
1
0
0
Stop Jog or
Registration Move
&
Capture Encoder Value
When the encoder is enabled on an SMD23E2 or
SMD24E2, the encoder position value is captured when
the input triggers a controlled stop to a Jog or Registration
move.
1
0
1
Emergency Stop
All motion is immediately stopped when this input makes
an inactive-to-active transition.
1
1
0
Home
Used to define the home position of the machine.
1
1
1
Invalid Combination
This bit combination is reserved.







































































