

















Unmanned Aircraft System
Professional
·
Advanced
- 61 -
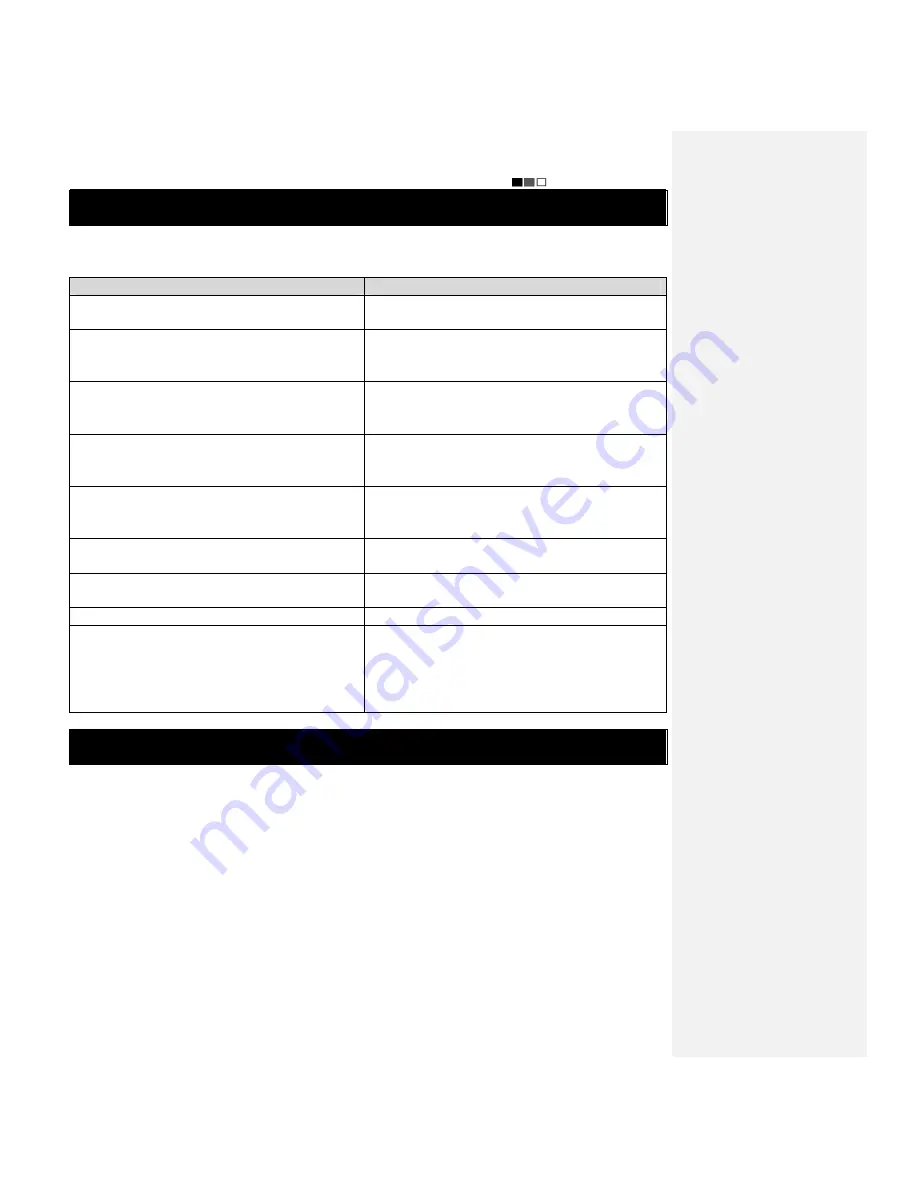
Troubleshooting
Before test flight, please read the “Operation Instruction” first. If normal take-off fails, please perform troubleshooting
according to the table below. If the problem still exists, please contact us immediately. To avoid unnecessary loss,
please do not operate blindly!
Symptom
Solution
Self-checking of the UAV fails after it is powered up (the
buzzer beeps all the time)
(1) Check if the removable arms are properly installed
Speeds of the four motors are obviously inconsistent
with each other after startup (some run fast, while some
run slowly)
(1) Make sure the UAV is placed on a flat ground before
self-checking
(2) Calibrate the UAV
The UAV cannot be started after successful
self-checking
Check the manual/auto switches of the remote control
and the ground station to make sure that they are in the
manual state
The state of navigation lights is abnormal; the normal
state is green in the front and red in the rear
Confirm whether the frame arms are properly installed
(frame arm A1 shall correspond to body A1, and so on
and so forth)
The remote control and the ground station shows
abnormality of flight attitude and compass (e.g., 360°
rotation)
Calibrate the compass, accelerometer and gyroscope
according to the instruction manual
The UAV fails to execute auto take-off and one-key
auto fly
Confirm whether the manual/auto switch of the remote
control or ground station is in auto state
The UAV cannot be controlled manually when it goes
home or lands upon low battery
Make sure that the manual/auto switch is switched 2-4
times when the throttle joystick is at the middle position.
The UAV inclines or rotates during one-key auto fly
Power off the UAV and then power it on again
Normal take-off fails when the throttle lever is pushed
forward after the UAV is started
(1) Check the four propellers of the UAV to see if they
are installed properly as required in the Instruction
Manual
(2) Check the power battery of the UAV to make sure the
battery level is high enough.
Protection Mechanism
1. During flying in the manual mode, when it is beyond the operating range, the UAV will enter the protection mode,
and automatically fly back to the take-off position and land.
2. During flying in the manual/auto mode, when the remote control or the ground station is powered off, the UAV
will enter the protection mode, and automatically fly back to the take-off position and land.
3. In case of Level 2 alarm for low battery, the UAV will enter the protection mode; at this moment, the UAV will
vertically descend to the ground (in case of an emergency, in the auto fly mode, you can switch to the manual
mode to control landing manually; in the manual fly mode, switch to the auto mode and then to the manual mode
to realize manual control of landing).
Summary of Contents for F100A
Page 4: ......




































































