





























Installation and Configuration
Soloist HPe 50/75/100
2.3.5.1. End Of Travel Limit Phasing
If the EOT limits are reversed, you will be able to move further into a limit but be unable to move out. To
correct this, swap the connections to the CW and CCW inputs at the motor feedback connector. The logic
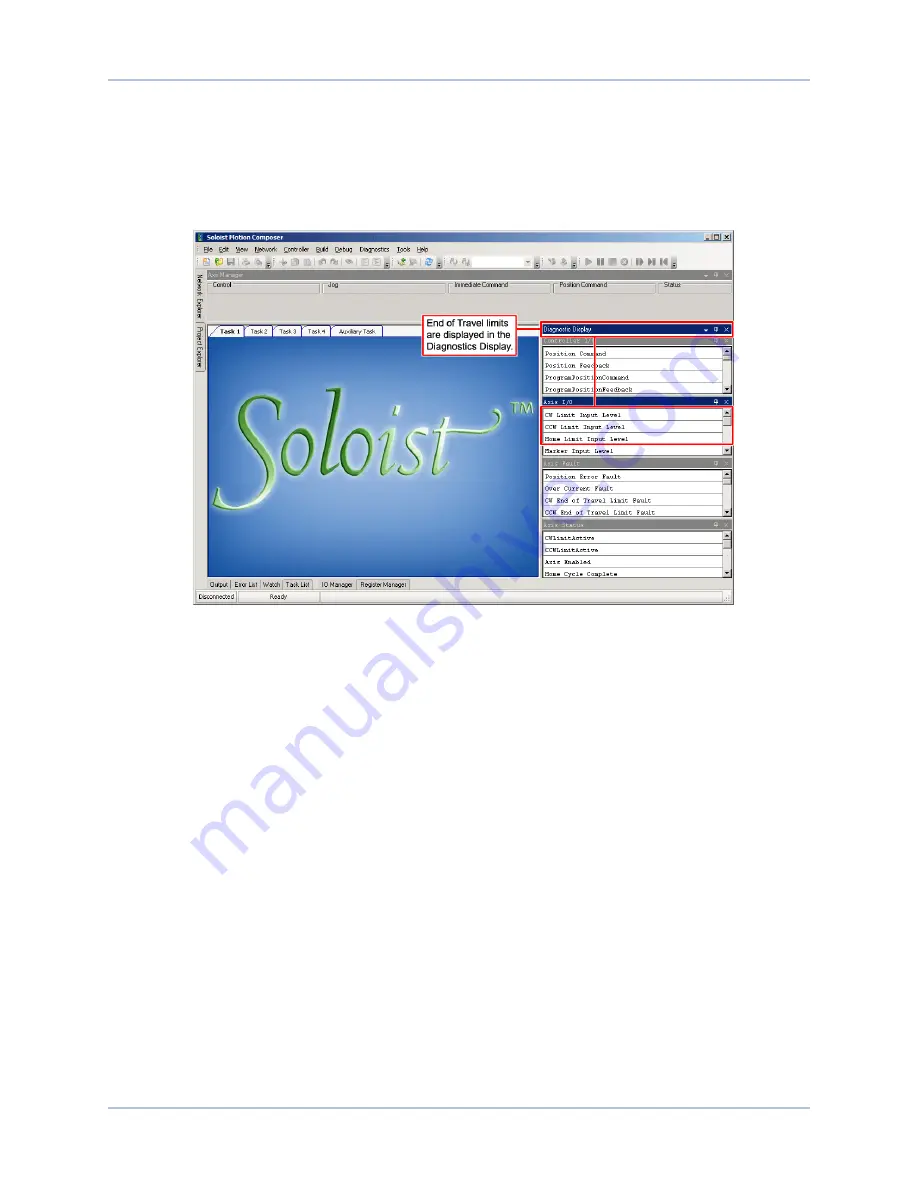
level of the EOT limit inputs may be viewed in the Diagnostic Display (shown in
).
Figure 2-22:
Limit Input Diagnostic Display
www.aerotech.com
Chapter 2
49







































































