



























+ User Manual
Indicator LEDs
version 1.4.9 (09/04/14)
page 31
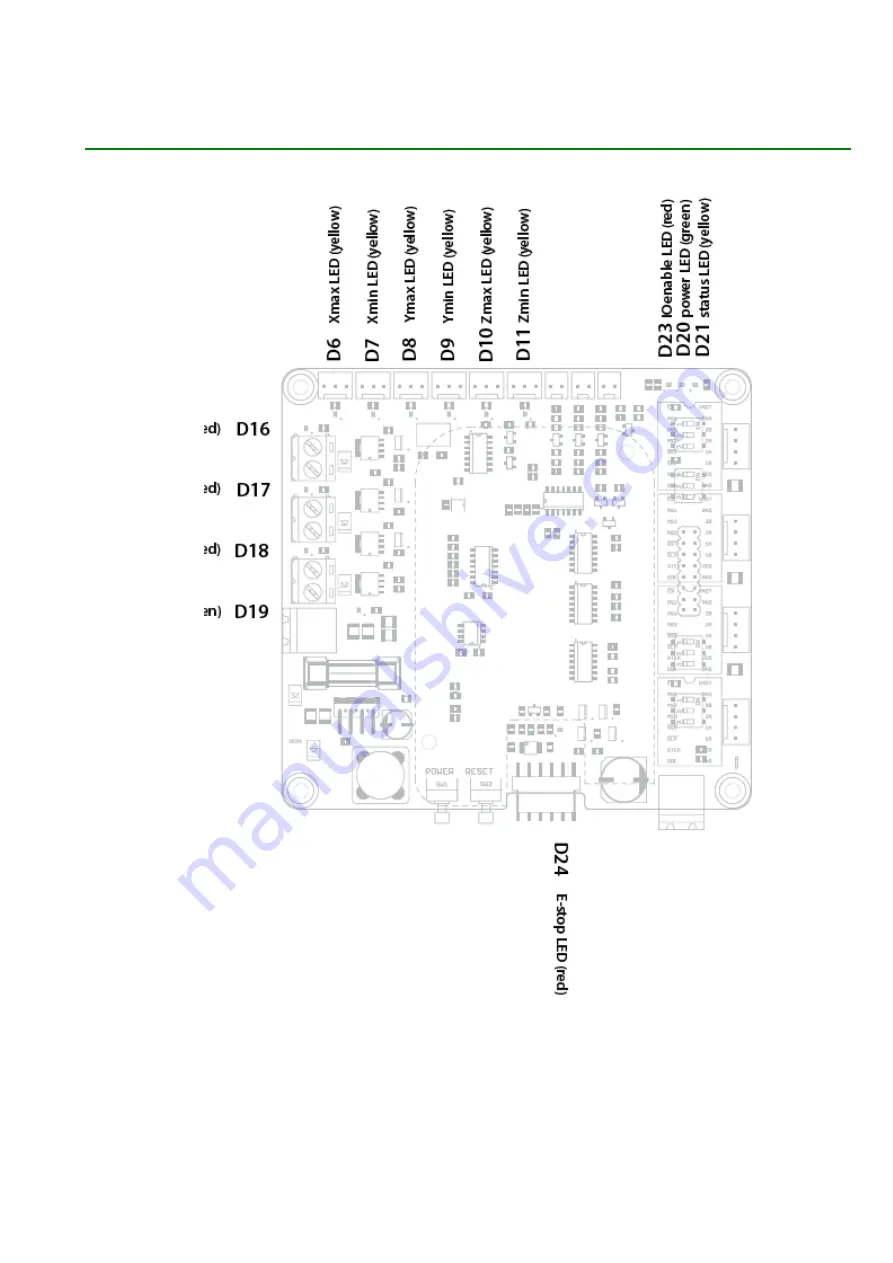
Illustration 11: LEDs on the BeBoPr
D
24
E-s
to
p L
ED
(re
d)
D19
D18
D17
D16
D
23
D
20
D
21
IO
en
ab
le
L
ED
(re
d)
po
w
er
L
ED
(g
re
en
)
st
at
us
L
ED
(y
el
lo
w
)
PWM0 LED (red)
PWM0 LED (red)
PWM0 LED (red)
power LED (green)
D
6
Xm
ax
L
ED
(y
el
lo
w
)
D
7
Xm
in
L
ED
(y
el
lo
w
)
D
8
Ym
ax
L
ED
(y
el
lo
w
)
D
9
Ym
in
L
ED
(y
el
lo
w
)
D
10
Zm
ax
L
ED
(y
el
lo
w
)
D
11
Zm
in
L
ED
(y
el
lo
w
)







































































