





























Chapter 2: Unpacking and installing the workstation
BenchCel Microplate Handling Workstation R-Series User Guide
30
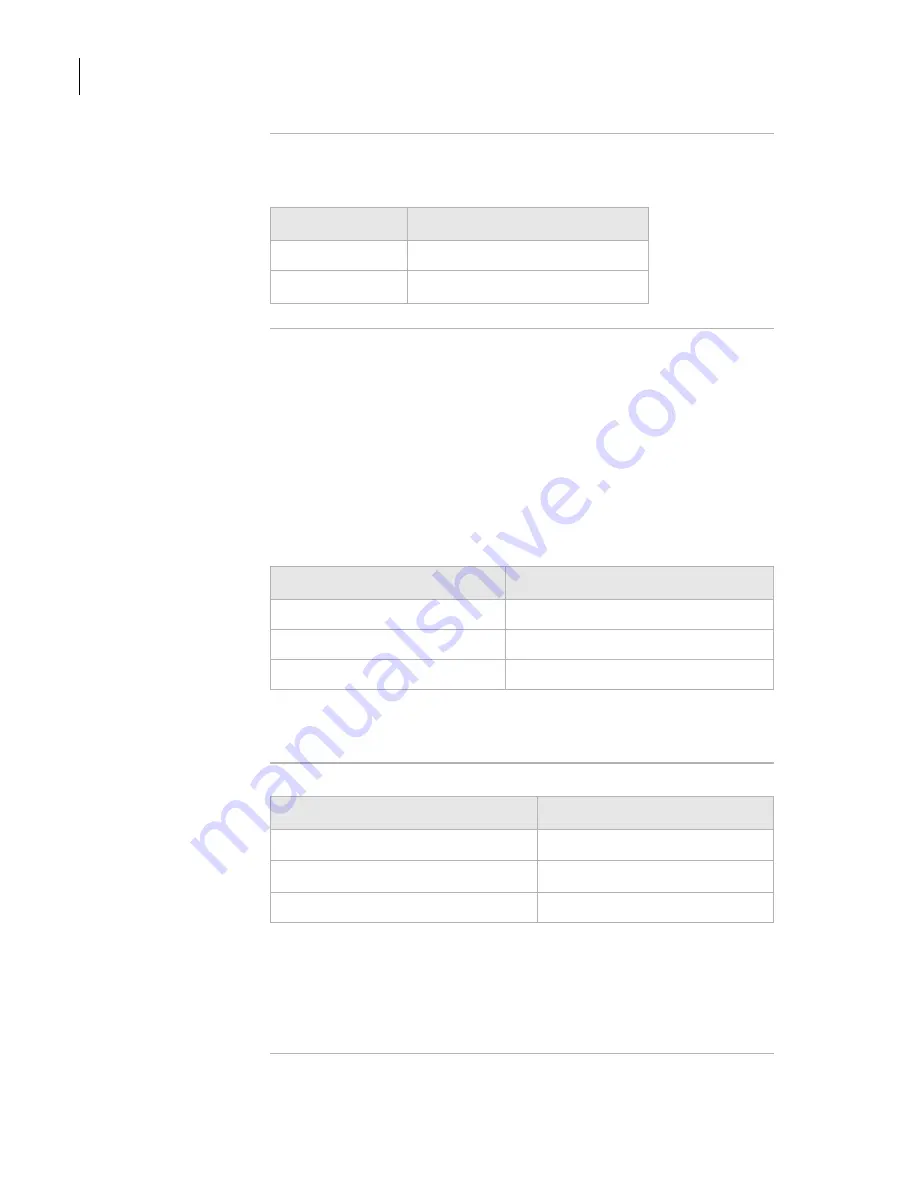
Electrical
The BenchCel device has the following power requirements. For power
requirements of other devices in the workstation, see the device user
documentation.
Compressed air
The BenchCel device requires the use of clean, dry, compressed air to
move pneumatic components inside the device. The compressed air
can be from the following sources:
❑
Centralized source (house)
❑
Compressed-air cylinders
❑
Portable pumps
!! DAMAGE HAZARD !!
Using oil compressors can cause oil to
leak into the BenchCel device and void your warranty.
To maintain the desired air supply in the device, the BenchCel device
requires a source of air as follows:
!! DAMAGE HAZARD !!
Air pressure greater than 0.69
MPa
(100
psi) can damage the BenchCel Workstation.
Environment
The lab must meet the following environmental requirements.
Velocity11 recommends that you do the following:
❑
Place the BenchCel Workstation away from heat and air
conditioning ducts.
❑
Place the BenchCel Workstation away from direct sunlight.
Utility
Requirement
Electrical
100–240~, 50/60 Hz, 5 A
Fuse
5 A, 250 V, 5
×
20 mm, fast acting
Requirement
Value
Quality
Clean, dry, compressed
Flow rate
340 Lpm (1.2 cfm)
Pressure
0.65–0.69 MPa (95–100 psi)
Requirement
Value
Ambient temperature
5–40
°C
Humidity condition
10–90%
RH, non-condensing
Elevation
1–2000 m
Summary of Contents for R Series
Page 4: ...Letter to our Customers 2 Agilent Technologies Inc Automation Solutions Division ...
Page 10: ......
Page 23: ......
Page 24: ......
Page 26: ......
Page 34: ...Preface BenchCel Microplate Handling Workstation User Guide viii ...
Page 60: ...Chapter 1 Introduction BenchCel Microplate Handling Workstation R Series User Guide 26 ...
Page 124: ...Chapter 4 Performing a run BenchCel Microplate Handling Workstation R Series User Guide 90 ...
Page 210: ...Appendix B Quick reference BenchCel User Guide 176 ...
Page 218: ...Index BenchCel Microplate Handling Workstation R Series User Guide 184 ...
Page 219: ......
Page 220: ...Agilent Technologies User Guide G5400 90001 ...







































































