




















Hardware connection and preparation
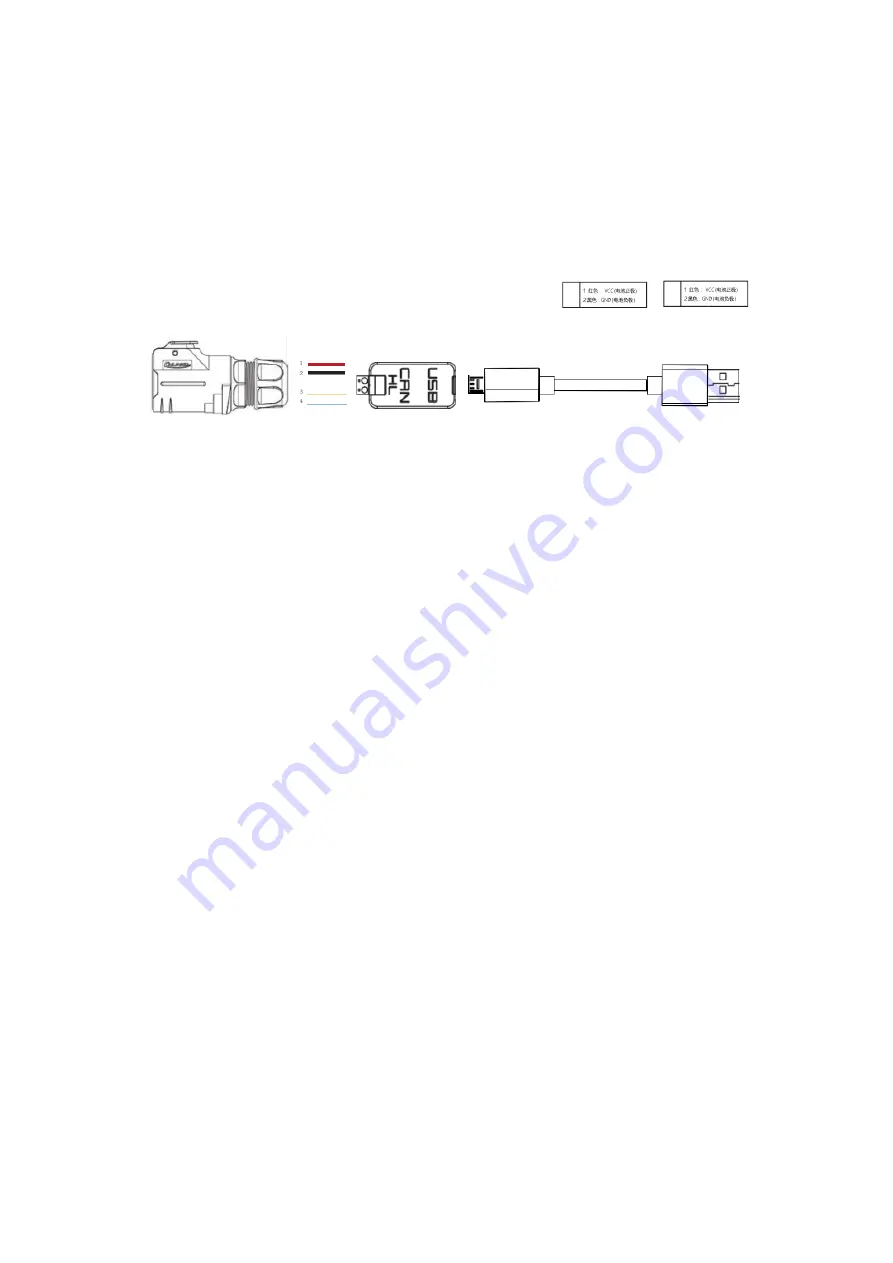
Lead out the CAN cable of the HUNTER SE tail plug, and connect CAN_H and CAN_L in the CAN cable to the
CAN_TO_USB adapter respectively;
Turn on the knob switch on the HUNTER SE mobile robot chassis, and check whether the emergency stop switches on
both sides are released;
Connect the CAN_TO_USB to the usb interface of the notebook. The connection diagram is shown in Figure 3.4.
Figure 3.4 CAN Connection Diagram







































































