2.1. Register Changes on VCT 49xyI-F1
2.1.1. DRX Part
The major improvement of the VCT 49xyI-F1 DRX-performance is based on the speed up of the Tuner-AGC, the
Video AGC and the Carrier Recovery. While the faster Tuner and Video AGC help to improve significantly the
Streaky Noise and Airplane Flutter issues, the extended Carrier Recovery removes all remaining field test matters.
Although the fast modes are activated by default, some new registers are introduced to enable the configuration of
the modified functions if necessary.
2.1.1.1. Comments to the Tuner and Video-AGCs
The fast mode of the Video AGC is enabled by default and can be switched off by FAST_VAGC_EN = 0. Neverthe-
less, switching off this new AGC is not recommended.
In earlier versions the VAGC_KI and TAGC_KI values had to be continuously updated to prevent the adaptive KI
control from setting them too low. In the new version a minimum limit register is implemented: BP_KI_MIN_BS
allows to determine the minimum allowed KIs.
For example : BP_KI_MIN_BS = 0x15 means: TAGC_KI must not be lower than 2 and VAGC_KI must not be lower
than 5.
BP_KI_MIN_BS is set to 0x15 by default. Should there be a need for further improving Streaky Noise, 0x16 or 0x17
can be user selected. With the new algorithm VAGC_KI = 6 or 7 are also stable settings and do not produce any
stripes.
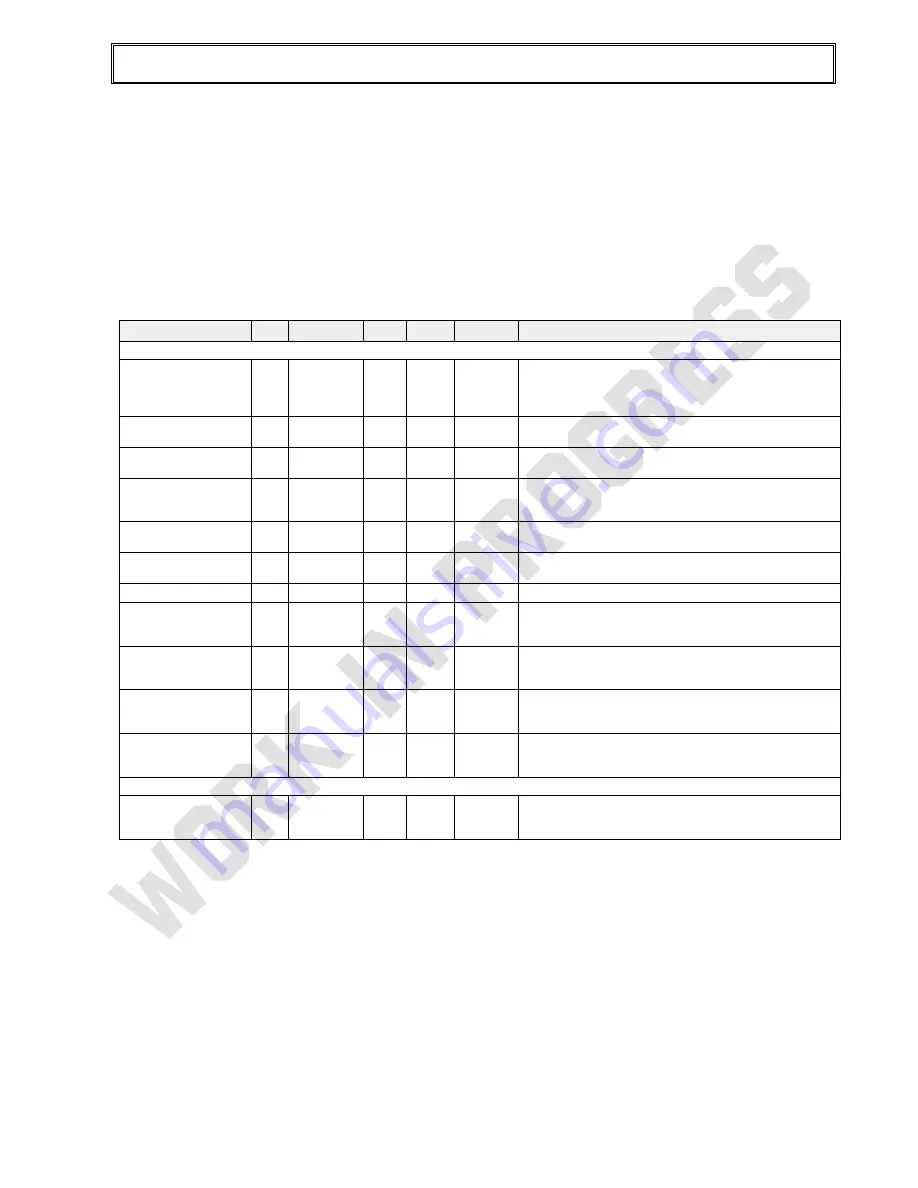
Table 2–4: New DRX Registers
Name
Sub
Addr
Dir
Reset
Range
Function
Advanced Settings
MOD_ACCU_BS[9:0]
h10
h100E[10:1]
RW
0
-512..511
Modulator imbalance value
Write:set manual imbalance value (with MOD_IF=0,
MOD_IR=0, for take-over set MOD_UPDATE=1)
Read:compensated imbalance value
MOD_UPDATE
h10
h100E[0]
W
0
0,1
Update modulator imbalance
1: write Modulator imbalance value into hardware
MOD_TH[3:0]
h10
h100F[11:8]
W
5
0..15
Imbalance control threshold
Selects the edge sensitivity
MOD_MODE
h10
h100F[7]
W
1
0,1
Imbalance Control estimation mode
0: trigger estimation on rising edges
1: trigger estimation on rising and falling edges
MOD_If[3:0]
h10
h100F[6:3]
W
6
0..15
Imbalance control integral part (falling)
The control uses this value for decreasing imbalance
MOD_Ir[2:0]
h10
h100F[2:0]
W
1
0..7
Imbalance control integral part (rising)
The control uses this value for increasing imbalance
NOISE_BS[3:0]
h10
h1013[3:0]
W
15
0..15
Maximum deviation for noise reduction
PHAC_BP
h10
h1015[9]
W
0
0,1
Phase correction bypass
0: active phase correction
1: bypass phase correction
FAST_VAGC_EN
h10
h1023[8]
W
1
0,1
Enable Fast VAGC
0: Fast VAGC disabled
1: Fast VAGC enabled
COMP_DC_MUX[2:0]
h10
h10B3[11:9]
W
7
0..7
Multiplexer for DC estimation during compensation
The reference signal is attenuated with the following filter
H(z) = 0.5*(1+z^-(4+COMP_DC_MUX)) @fs=40.5MHz
COMP_FREQ_BS[8:0]
h10
h10B3[8:0]
W
93
0..511
Increment for reference signal generation
19.7kHz<fref<10.1MHz
COMP_FREQ_BS = (fref*2048/40.5MHz)
Firmware
BP_KI_MIN_BS[5:0]
h10
h10A5[5:0]
W
21
0..63
Minimum KI setting
TAGC_KI and VAGC_KI will not be set
below this values
CIRCUIT DESCRIPTIONS