




























Chapter 5 Detailed Function Introductions
52
If the motor runs properly but the direction is reversed, the user changes the
parameter P2.37 and P2.45.
When the encoder is not mounted on the motor shaft, please set the correct P2.50
(motor and encoder reduction ratio)
5.2 I/O Terminal Ctrl
P3.01 X1 terminal function
1:FWD Forward Run / Run Enable
P3.02 X2 terminal function
2:REV Reverse Run / Direction
P3.03 X3 terminal function
54:
Control Enable
P3.04 X4 terminal function
55:
Exact stop spindle
P3.05 X5 terminal function
56: Rigid tapping / pulse position
P3.06 X6 terminal function
37: EH0 external fault normally open
P3.07 X7 terminal function
6: RST Reset
Notes:
Set the appropriate terminals to the other features when the above function is no
need.
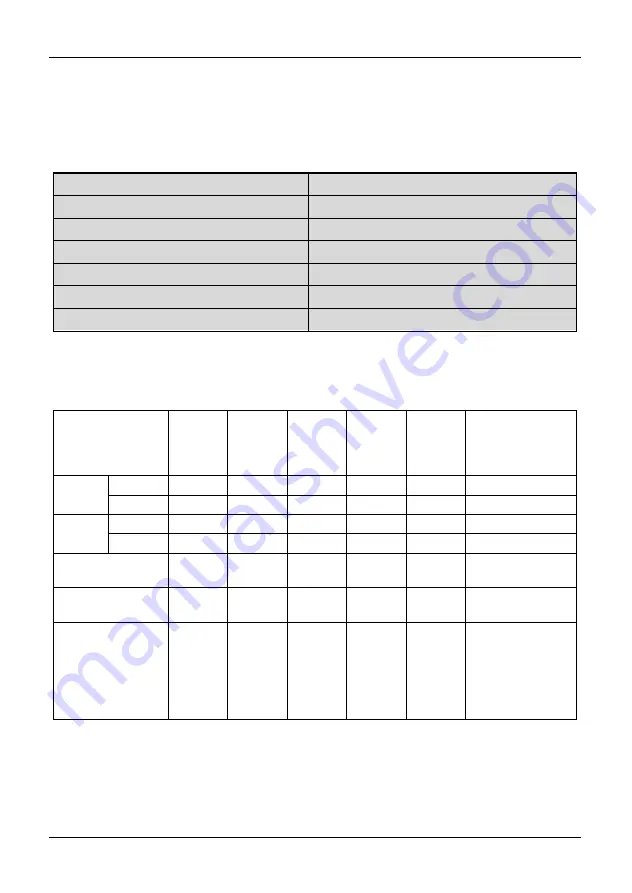
Control sequence is as follows(P0.03 must be set to the terminal control) :
Function
Control
Enable
X1
Forward
x2
Reverse
X4
Orientat-
ion
X5 Rigid
tapping /
pulse
position
Explanation
Forward
run
Unipolar
1 1 0 0 0
bipolar
1 1 0 0 0
Analog
is
positive
Reverse
run
Unipolar
1 0 1 0 0
bipolar
1 1 0 0 0
Analog
is
negative
Exact stop spindle
1
× × 1 ×
Exact stop spindle
highest priority
Rigid tapping
(pulse position)
1
× × 0 1
Free state
0
× × × ×
Control enabled
by X3 enabled, or
internal enable,
P3.18 = 1 (default
is internal
enabled)
Notes: 1 represents the effective,
0 is invalid.
× is an arbitrary value
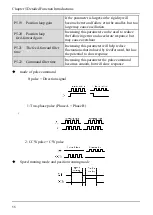
When the speed is up to a unipolar analog or a digital timer ,the running command and
direction is as follows:
Summary of Contents for AS600M Series
Page 96: ...96 ...







































































