




























Chapter 5 Detailed Function Introduction
55
used to adjust the speed of spindle position loop .when X4 active high,the
frequency converter run into analog quantity rigid tapping.In order to improve the
resolution of the speed
,
usually P5.06 should not be too big
,
and the frequency
should be linked to the max speed of rigid tapping on the system.
P5.08 rigid tapping
(
position
)
Speed loop proportional gain 1
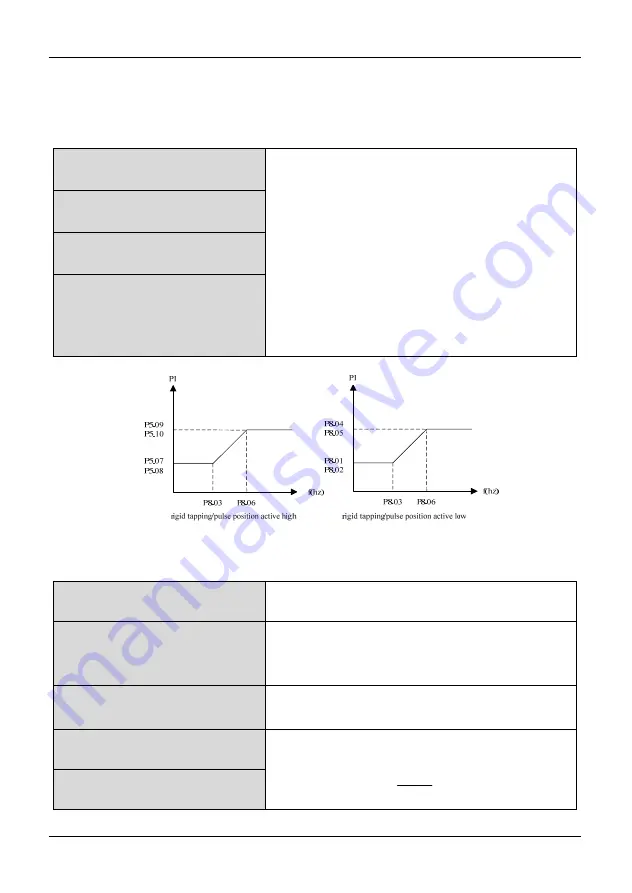
Rigid tapping/pulse position terminal active
high,the two set of parameters P5.07
、
P5.08andP5.08
、
P5.09active high
;
Rigid
tapping/pulse position terminal active low,the two
set of parameters P8.01
、
P8.02and P8.04
、
P8.05
active high
;
gain 1 and gain 2,integral time 1 and
integral time 2 transition switch by P8.03 and
P8.06.
The larger the gain
,
the better the rigid,but
may cause oscillation. The smaller the gain
,
the
better the rigid,but may cause oscillation.
P5.08 rigid tapping
(
position
)
Speed loop integral time 1
P5.09 rigid tapping
(
position
)
Speed loop proportional gain 2
P5.10 rigid tapping
(
position
)
Speed loop integral time 2
5.4.2Pulse position mode
(
C-Axis Function
、
indexing
、
Pulse rigid tapping
)
P0.04 position command
selection
1
:
pulse position control
P5.00 mode of pulse command
0
:
pulse + Direction signal
1
:
Two-phase pulse (Phase A + Phase B)
2
:
CW/CCW
P5.01 the opposite direction of
position command
0
:
not
1
:
Yes
P5.11 Numerator of the
electronic gear ratio
The actual number of pulses =the number of
pulses that receives×
P5.11
P5.12
P5.12 Denominator of the
electronic gear ratio
Summary of Contents for AS600M Series
Page 96: ...96 ...







































































