




























Chapter 5 Detailed Function Introductions
56
P5.19 Position loop gain
If the parameter is larger,so the rigidity will
become better and follow error be smaller, but too
large may cause oscillation.
P5.20 Position loop
feed-forward gain
Increasing this parameter can be used to reduce
the following error and accelerate response, but
may cause overshoot
P5.21 The feed-forward filter
time
Increasing this parameter will help reduce
fluctuations that induced by feedforward, but has
the potential to slow response
P5.22 Command filter time
Increasing this parameter the pulse command
becomes smooth, but will slow response
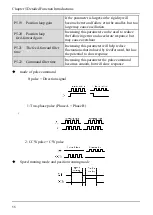
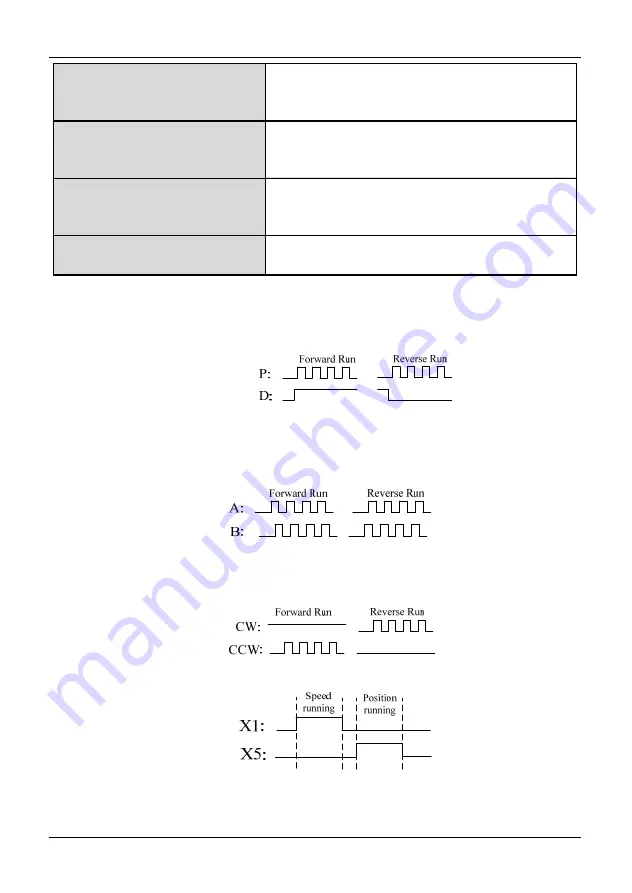
mode of pulse command
0: pulse + Direction signal
1: Two-phase pulse (Phase A + Phase B)
:
2: CCW pulse + CW pulse
Speed running mode and position running mode
Summary of Contents for AS600M Series
Page 96: ...96 ...







































































