




























Chapter 5 Detailed Function Introduction
57
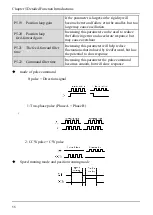
5.5 Spindle Orientation
P6.09 Orientations direction
selection
0
:
current direction
;
1
:
positive direction
;
2
:
negative direction;
P6.10 Accrate stop frequency
reaching this frequency before accrate stop
P6.15 Orientation completed
width
When the driver accurate stop and position
deviation in complete range, after completion
time it will send a singal of accurate stop
P6.16 Orientation completed time
P6.17 Orientation location
selection terminal filter time
This parameter indicates the time that location
selection terminals to determine position when
the accurate stop location is chose
From a plurality of locations
P6.18 Orientation deceleration
time
This parameter indicates the deceleration time the
driver used from
High-speed to accurate stop
P6.26 Orientation location 1
~
P6.33 Orientation location 8
User can choose one position from 8 positions
through the terminals
P6.40 Accrate stop response
constant
Increasing this parameter can eliminate the
overshoot caused by spindle inertia,but will slow
down response
P6.41 a circle of pulses number
This value is 4 times frequency value.When the
spindle and motor speed reduction ratio is
1:1,this value is 4 times the number of encoder
line
P6.42 Enter zero servo lock range
The lowest frequency before accurate stop is limit
at accurate stop
Crawling frequency,when the devitation and
target position in the locking range within
moment in zero lock range
P6.45 Accurate stop crawling
frequency
Summary of Contents for AS600M Series
Page 96: ...96 ...







































































