DE-3000+ IOI 8-15
All rights reserved © ALTRONIC, LLC 2015
41
In addition to defining the input/output relationship, the relationship of the con-
trol output value to the actuator must also be defined as either direct or inverse
acting. As in the case of the control input/output relationship, the direct act-
ing output mechanism is one where an increase in current from the controller
causes an increase in load on the compressor. An inverse operating actuator is
one where the current is decreased to increase the load on the compressor.
14.0 PID CONTROL
14.1 PID control may be applied to two analog outputs (4 with an extra terminal
board) and is an industry standard for control. P, I and D, along with the set-
point and deadband may be set by the user for controlling processes. These
values may be tuned during engine operation for system stability. Use the PC
terminal program to initially configure the system.
15.0 CASCADE CONTROL
Channel 01 is used to drive the output on A02. CASCADE RPM control enables
engine speed to be controlled based on the control setpoint on Loop #1. Once
Loop #1 is forcing a maximum output, Loop #2 will drive an output to increase
engine speed up to a maximum RPM in order to achieve the control setpoint on
Channel 01. See section 13.0 for more information.
16.0 LINEAR/RAMP CONTROL
16.1 LINEAR/RAMP control maps Channel 01 setpoints to defined 4-20 mA states
(mapped to RPM values) on A02. This can be set up for either direct or inverse
acting. LINEAR/RAMP control can be initiated either after a specified warmup
time or the time when input on Channel 26 surpasses its low control setpoint.
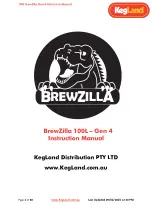
16.2 For a Linear/Ramp Control example, assume the unit is programmed as follows:
Linear/Ramp Control for suction pressure on Channel 01
Low setpoint = 5.0 PSIG at 6mA
High setpoint = 20.0 PSIG at 18mA
This will create a graph as follows:
18mA
6mA
5.0 PSIG
20.0 PSIG
A02 (4–20mA) vs. Suction Pressure